 2014-02-24
2014-02-24 1582
1582СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
В 1957 г. группа советских ученых под руководством академика В. А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственных спутников Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого с ИСЗ, в точке приема с известными координатами. Была установлена также возможность решения и обратной задачи нахождения координат точки приема по измеренному доплеровскому сдвигу частоты сигнала, излучаемого с ИСЗ, параметры движения которого известны.
Использование ИСЗ в качестве радионавигационной опорной станции, координаты которой хотя и изменяются, но заранее известны для любого момента времени, позволило создать ряд проектов спутниковых радионавигационных систем (СРНС) первого поколения. Характерной чертой первого поколения СРНС является применение низковысотпых (низкоорбитных) ИСЗ и использование для навигационных определений сигнала одного, оказывающегося в зоне радиовидимости наблюдателя ИСЗ.
Рассмотрим следующую упрощенную модель (рис.10.1). Пусть ИСЗ вращается с известной постоянной скоростью Vисз по окружности радиусом Rисз в плоскости, проходящей через центр сферы (Земли). Положение ИСЗ в каждый момент времени известно, наблюдатель (потребитель) неподвижен и находится на поверхности Земли в некоторой точке П. ИСЗ излучает гармонические колебания частотой f0. Наблюдатель имеет возможность сравнивать частоту принимаемого от ИСЗ колебания fпр(t) с частотой бортового эталона. Бортовой эталон имеет ту же частоту колебаний, что и излучаемый ИСЗ сигнал. Измерив разность частот fnp (t)-f0 = Fд(t) можно построить зависимость доплеровского сдвига частоты Fa(t) от времени t (рис. 10.2). В момент t0 доплеровский сдвиг Fд(t)=0, что соответствует наикратчайшему расстоянию между ИСЗ
и потребителем. Наблюдатель, зафиксировавший момент изменения знака
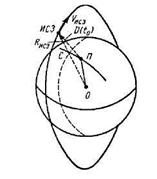
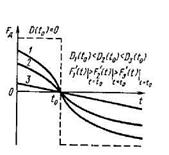
Рис. 10.1 Рис.10.2
доплеровской частоты, может утверждать, что находится в плоскости, нормальной к вектору скорости. ИСЗ. Зная координаты ИСЗ в момент времени t0 и направление его движения, можно построить поверхность положения в виде плоскости, а также линию положения на поверхности Земли (линия СП на рис. 14.1). Для определения на этой линии точки, соответствующей местонахождению наблюдателя, можно использовать зависимость крутизны кривой Fд(t) в момент t0 (кривые 1-3 на рис. 10.2) от расстояния между ИСЗ и точкой приема П. Действительно, для заданных Vисз f0 и Rс крутизна изменения Fд(t) в окрестности точки t0 однозначно связана с наклонной дальностью D(t0), т. е, расстоянием между ИСЗ и потребителем в момент времени t0. Определив D(t0), строят поверхность положения в виде сферы с центром в точке нахождения ИСЗ в момент t0. Местоположение потребителя соответствует точке пересечения этой сферы с линией положения СП.
Таким образом, измерив t0 и крутизну зависимости доплеровской частоты от времени F'(t)|t=t0, находят координаты потребителя на поверхности Земли.
Рассмотренный метод определения координат называют дифференциальным доплеровским (траверзным).
В космических РНС особое внимание уделяется зависимости качества радионавигационных измерений от мощности излучаемого ИСЗ сигнала. Помехоустойчивость радионавигационного канала тем выше, чем большая часть энергии принятого сигнала используется для измерения РНП. В связи с этим получил распространение метод радионавигационных измерений, основанный на интегрировании доплеровской частоты.
Пусть в точке приема (рис. 10.3) вычисляют интеграл
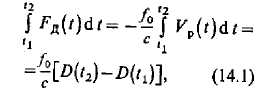
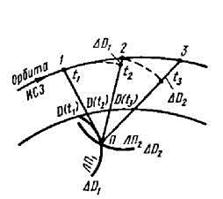
Рис. 10.3
где t2-t1 - Dt-фиксированный интервал времени; Vp(t) - радиальная скорость ИСЗ относительно потребителя. Как следует из (10.1),
 (10.2)
(10.2)
Таким образом, вычисление интеграла от доплеровской частоты в пределах t1 -t2 фиксирует разность дальностей DD1 до ИСЗ в последовательные моменты времени t1 и t2, т. е. дает значение навигационного параметра в разностно-дальномерной РНС с опорными станциями, координаты которых определяются положением ИСЗ в эти моменты времени. Фиксированное значение DD1 соответствует поверхности положения в виде гиперболоида. Производя интегрирование Fd(t) в течение интервала времени t2-t3 и пересчитав результат в разность расстояний получим вторую поверхность положения.
 , (10.3)
, (10.3)
Положение наблюдателя характеризуется точкой пересечения этих гиперболоидов с земной поверхностью. Возникающая при этом неоднозначность решения навигационной задачи (точка пересечения поверхностей положения не является единственной) устраняется, как и в наземных РНС, с помощью априорных данных о координатах потребителя.
Рассмотренный метод нахождения координат называют интегральным доплеровским.
Искомые координаты рассчитывают с помощью бортового вычислителя. Как и в наземных беззапросных РНС, в спутниковых РНС основным условием является точная привязка результатов измерения РНП к единой шкале времени. Для этого в аппаратуру потребителя вводят высокостабильный эталон частоты, обеспечивающий формирование бортовой шкалы времени. Коррекцию бортовой шкалы времени осуществляют с помощью специальных меток времени в принимаемом радиосигнале. Кроме того, для вычисления текущих пространственных координат ИСЗ на борту потребителя необходимо иметь эфемеридную информацию, т. е. предвычисленные значения координат и вектора скорости ИСЗ.
Эфемеридную информацию в форме параметров орбиты ИСЗ либо его геоцентрических координат передают с борта ИСЗ с помощью модуляции (фазовой или частотной) непрерывной несущей, используемой для интегральных доплеровских измерений.
Приведенные соображения о возможности применения в СРНС интегрального доплеровского метода носят общий характер и не учитывают ряда важных факторов, влияющих на качественные показатели системы. Для того чтобы составить представление о влиянии этих факторов (интервалов времени между навигационными сеансами, параметров движения потребителя и др.) на точность определения местоположения потребителя, рассмотрим низкоорбитную СРНС «Транзит». В состав этой СРНС входят пять или шесть ИСЗ, наземный комплекс контроля и парк бортовой аппаратуры потребителей. ИСЗ расположены на круговых полярных орбитах высотой около 1100 км и имеют период обращения около 107 мин. При таких параметрах орбит каждый ИСЗ может находиться в зоне радиовидимости потребителя, радиус которой достигает 2000 км, от 10 до 16 мин. Учитывая, что период передачи навигационной информации (эфемеридная информация, метки времени, служебная информация) равен 2 мин, а время нахождения ИСЗ в зоне радиовидимости 10-16 мин, за один пролет ИСЗ можно получить несколько поверхностей положения. Например, если Dt = t2 -t1 =2 мин, что соответствует расстоянию между положениями спутника в точках 1, 2, 3,... около 960 км, то число поверхностей положения будет 5-8, тогда как минимальное достаточное для местоопредсления число 3. Избыточное число образованных поверхностей положения может быть использовано для статистического сглаживания получаемых оценок координат. Кроме сглаживания избыточная информация позволяет измерить не только координаты - географическую широту и долготу, но и расхождение между шкалами времени потребителя и ИСЗ.
В рассматриваемой системе применяют два высокочастотных сигнала: основной (400 МГц) и вспомогательный (150 МГц), что дает возможность произвести компенсацию ошибки, обусловленной ионосферной рефракцией при доплеровских измерениях. Передачу навигационной информации осуществляют путем фазовой модуляции обеих несущих двоичными посылками ±60°, что сохраняет постоянный уровень несущего колебания и обеспечивает устойчивую работу канала фазовой автоподстройки частоты (ФАПЧ) вне зависимости от передаваемой последовательности информационных посылок.
При движении потребителя точность местоопределепия зависит от точности оценки скорости объекта. Это объясняется тем, что для нахождения координат потребителя как точки пересечения нескольких поверхностей положения, соответствующих различным моментам времени, необходимо линии положения привести к одному моменту времени. Точное решение этой задачи возможно лишь при известных параметрах движения потребителя в интервалах между оценками РНП. Например, при погрешности измерения скорости объекта DVп = 0,5 м/с погрешность местоопредсления составляет 500 м, в то время как погрешность местоопределения неподвижного объекта приблизительно равна» 50 м.
Кроме того, в рассматриваемых СРНС невозможно непрерывно осуществлять местоопределение потребителей из-за наличия длительных перерывов между обсервациями (прохождениями спутниками зоны радиовидимости). Средний интервал времени между обсервациями зависит от географической широты потребителя и колеблется от 35 мин в приполярных районах до 90 мин вблизи экватора. Уменьшение этого интервала путем увеличения числа спутников в данных системах невозможно, так как все ИСЗ излучают сигналы на одних и тех же частотах. При нахождении в зоне радиовидимости нескольких спутников возникают взаимные помехи, что нарушает работоспособность систем.
Таким образом, существующие низкоорбитные СРНС обладают по крайней мере двумя серьезными недостатками: малой точностью определения координат высокодинамичных объектов и большим интервалом времени между обсервациями.








