2014-02-09
2014-02-09 1070
1070Отметим две особенности функционирования ЭВМ, которые приходится учитывать при разработке ИМ сложных систем.
1. Сложная система S, как правило, состоит из многих элементов. Все элементы системы S функционируют одновременно. Однако в большинстве современных ЭВМ параллельное выполнение нескольких программ, имитирующих поведение отдельных элементов системы, невозможно.
2. Поскольку ИМ — это программы для ЭВМ, то они должны оперировать с конечным множеством данных и, следовательно, имитировать поведение системы S не во все моменты времени t  [О, Т ], а лишь в некоторые, составляющие конечное множество
[О, Т ], а лишь в некоторые, составляющие конечное множество  [О, T],
[О, T],  (где
(где  означает мощность множества
означает мощность множества  ),
),
Чтобы обеспечить имитацию параллельных (одновременных) событий системы S на конечном множестве моментов времени , в ИМ используется специальная переменная t, называемая системным модельным временем или просто модельным временем (MB).
MB t следует отличать от других типов времени, используемых при ИМ систем, таких, как: tp — реальное время системы S, функционирование которой имитируется; tэ — машинное время имитации, отражающее затраты ресурса времени ЭВМ на организацию имитационного моделирования.
Существуют два способа формирования конечного множества моментов времени , известных как принципы организации изменения модельного времени " " и "
" и " ".
".
"Принцип " заключается в изменении MB с фиксированным шагом .
"Принцип " заключается в изменении MB при скачкообразном изменении вектора состояния х системы S на некоторую величину ( 0).
0).
Для моментов времени t* из множества , сформированного по принципу "", справедливо
x(t* + 0) = х(t*) + , t*  .
.
Для моментов времени из множества [О, T] \ вектор состояний изменяется непрерывно (либо остается неизменным).
Заметим, что скачкообразные изменения состояния системы S происходят при наступлении таких "особых" событий, как поступление управляющих сигналов и внешних воздействий, выдача выходных сигналов и т.п.
Приведем более строгое описание принципов "" и "" и поясним их особенности. Пусть СС S состоит из N элементов: A(1),..., А (N) поведение которых предполагается моделировать:
S={A(1),...,А(N))}.
Для каждого элемента А(i) S (i = 1 ,..., N) определим локальное модельное время (ЛМВ) t(i) [О, T]. Поведение элемента А(i) S в течение интервала моделирования определяется некоторой последовательностью действий

где G — множество всевозможных действий для элементов S. На множестве G будем выделять подмножество действий D: D  G, для выполнения которых в ИМ требуется некоторое ненулевое модельное время.
G, для выполнения которых в ИМ требуется некоторое ненулевое модельное время.
Будем обозначать такие действия  , а интервалы модельного времени, затрачиваемые на выполнение этих действий, соответственно:
, а интервалы модельного времени, затрачиваемые на выполнение этих действий, соответственно: . Последовательность {
. Последовательность { } (j=
} (j= ) является последовательностью случайных величин с заданными законами распределения L{ }, i=
) является последовательностью случайных величин с заданными законами распределения L{ }, i= .
.
Действия { } D приводят к наступлению в системе S особых событий {
} D приводят к наступлению в системе S особых событий { }. События {
}. События { }, к которым приводят действия {
}, к которым приводят действия { }: {} G \ D, не требующие затрат MB, считаются неособыми.
}: {} G \ D, не требующие затрат MB, считаются неособыми.
Момент ЛМВ наступления события для  определяется по формуле:
определяется по формуле:
 (3.5)
(3.5)
где имитируется на ЭВМ в соответствии с законом распределения L{}, t*— текущее значение MB.
Состояние системы S в момент времени t [0, Т] определяется вектором состояния x(t) X Rn. Состояния системы в моменты  наступления особых событий будем называть особыми состояниями, а состояние x (0) — начальным состоянием системы.
наступления особых событий будем называть особыми состояниями, а состояние x (0) — начальным состоянием системы.
Для иллюстрации принципов "" и "" используем временную диаграмму, изображенную на рис.3.7
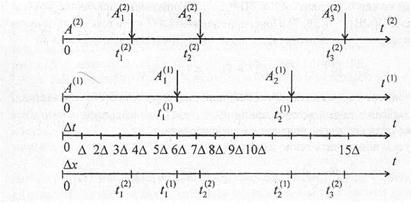 |
Рис. 3.7 Временная диаграмма
Описание временной диаграммы.
Пусть число моделируемых элементов в S равно 2, т.е. N = 2, и S = {A(1), A(2)}.
Временная диаграмма включает:
— временную ось ЛМВ t (1)для элемента А (1),
— временную ось ЛМВ t (2) для элемента А (2),
— временную ось модельного времени по принципу "";
— временную ось модельного времени по принципу "".
Временные оси будем помечать символами ”А(1)”,  ”А(2)”, ""; "".
”А(2)”, ""; "".
Пусть в течение рассматриваемого интервала моделирования
[0, Т] для элемента А (1) произошло 2 события:  в моменты
в моменты  , для элемента A (2) — 3 события:
, для элемента A (2) — 3 события:  в моменты
в моменты 
Предположим, что хронологическая последовательность событий такова:

Принцип " ".
В соответствии с принципом " " изменение модельного времени t происходит через промежутки времени, равные , т.е. t в течение времени моделирования Т принимает конечное множество значений:

При этом событиям, которые попадают в интервал постоянства MB  r = ((r - 1 ), r
r = ((r - 1 ), r t), r =
t), r =  , в ИМ присваивается один и тот же момент наступления: t = rt. Выбор величины t существенно влияет как на быстродействие ИМ, так и на точность аппроксимации СС S с помощью ИМ. Пусть t выбран таким, как указано на диаграмме (рис.2.1), т.е. моменты наступления событий в S принадлежат следующим интервалам:
, в ИМ присваивается один и тот же момент наступления: t = rt. Выбор величины t существенно влияет как на быстродействие ИМ, так и на точность аппроксимации СС S с помощью ИМ. Пусть t выбран таким, как указано на диаграмме (рис.2.1), т.е. моменты наступления событий в S принадлежат следующим интервалам:
 ,
,
Это означает, что соответствующим событиям в ИМ будут присвоены следующие моменты наступления:

При этом фазовая траектория системы S с вектором состояний x(t) X будет иметь вид:
х(0), x(t) = x(2t) = x(0), x(3t) = х( ), x(4t) = x(5t) = x(3t),
), x(4t) = x(5t) = x(3t),
x(6t) = х( ), x(7t) = x(8t) = x(9t) = x(6t), x(10t) = x(
), x(7t) = x(8t) = x(9t) = x(6t), x(10t) = x( ),
),
x(11t) =...=x(14t) = x(10t), x(15t) = x( ).
).
На основании полученной фазовой траектории можно сделать следующие выводы относительно выбора t:
1) если t — мало, то выполняется много лишних вычислений состояний системы в моменты, когда вектор x(t) не изменяется (за счет этого возрастает tэ выполнения ИМ);
2) даже при сравнительно малом значении t моменты наступления событий в системе (а следовательно, и моменты изменения состояния системы) не совпадают с моментами наступления событий в ИМ, поэтому фазовая траектория, построенная с помощью ИМ, на множестве [0, Т] не совпадает с фазовой траекторией системы S.
Принцип ”х".
В соответствии с принципом "х" изменение модельного времени происходит в моменты наступления событий или, что то же самое, в моменты особых состояний, т.е. для нашего примера:

а фазовая траектория, построенная с помощью ИМ, будет совпадать на множестве [0, Т] с фазовой траекторией системы S:

Приведем более строгие формулировки правил изменения MB по принципам "" и "".
Пусть t* < Т — некоторый момент особого состояния системы S;
ri — число событий, произошедших с элементом  S до момента t* включительно (i = 1,..., N)',
S до момента t* включительно (i = 1,..., N)',
 — момент наступления последнего для элемента А(i) события до момента t* включительно;
— момент наступления последнего для элемента А(i) события до момента t* включительно;
 > t* — момент наступления ближайшего после ri будущего события;
> t* — момент наступления ближайшего после ri будущего события;
 — общее число событий в момент t*
— общее число событий в момент t*
t** и  **— моменты ближайших будущих событий в ИМ, вычисленные по принципам "" и "" соответственно.
**— моменты ближайших будущих событий в ИМ, вычисленные по принципам "" и "" соответственно.
Модельное время t в ИМ можно рассматривать как функцию от числа событий, происходящих в ИМ. Очевидно: t(r) = = t* < Т, r = 0, 1, 2,...,

где { }, {} определяются соотношением (3.5) Заметим, что
}, {} определяются соотношением (3.5) Заметим, что
моменты МB t** = Т и ** =  (если
(если  ) являются моментами завершения моделирования.
) являются моментами завершения моделирования.
Правила (3.6) и (3.7) называются правилами изменения модельного времени по принципам "" и "" соответственно.
Пример. Проиллюстрируем эти правила с. помощью рис. 3.7
Пусть  , тогда r1=1, r2=2, r=r1+r2 = 3, t(4)=t**=min
, тогда r1=1, r2=2, r=r1+r2 = 3, t(4)=t**=min  так как
так как 
На практике отдается предпочтение принципу "". Принцип "" используется лишь в случаях, когда:
1) события {} таковы, что  const на всем интервале моделирования Т, и, следовательно, можно подобрать интервал изменения MB, обеспечивающий минимальную погрешность аппроксимации (например, для разностных уравнений);
const на всем интервале моделирования Т, и, следовательно, можно подобрать интервал изменения MB, обеспечивающий минимальную погрешность аппроксимации (например, для разностных уравнений);
2) событий очень много и они появляются группами. В этом случае за счет групповой обработки событий  , попавших внутрь очередного шага изменения , удается уменьшить затраты машинного времени.
, попавших внутрь очередного шага изменения , удается уменьшить затраты машинного времени.
В большинстве практически важных случаев события наступают через случайные интервалы времени  . Поэтому способ задания шага до следующего события экономичнее (в смысле затрат машинного времени) и точнее (в смысле точности аппроксимации) фазовой траектории способа фиксированного изменения МВ.
. Поэтому способ задания шага до следующего события экономичнее (в смысле затрат машинного времени) и точнее (в смысле точности аппроксимации) фазовой траектории способа фиксированного изменения МВ.