 2014-02-24
2014-02-24 570
570ПРОЕКТИРОВАНИЕ СТРУКТУРЫ ПРИВОДА SIMODRIVE
Проектирование структуры приводов SIMODRIVE осуществляется в два этапа:
• Этап 1 – выбор компонентов.
• Этап 2 – конфигурация соединений.
На первом этапе необходимо выбрать:
1. Двигатель, датчики и платы управления.
2. Силовые модули.
3. Модули питания.
После выбора всех компонентов привода необходимо проверить и учесть все условия по подключению к сети, обеспечить электромагнитную совместимость компонентов, составить схемы соединения аппаратуры и разработать компоновку шкафа.
Выбор двигателя должен осуществляться на основе механических и динамических требований, предъявляемых к двигателю. Требования к перегрузочной способности двигателя зависят от высоты и количества пиковых нагрузок во время эксплуатации.
Для защиты двигателей необходимо использовать защитные выключатели. При перегрузке двигателя должно быть предусмотрено включение сигнального контакта.
Также необходимо предусмотреть контроль соединения двигателя с силовым модулем. Если двигатель при эксплуатации с активированным разрешением импульсов отсоединится от силового модуля, то существует опасность саморазрушения силовой части и платы управления.
Если к двигателю присоединен стояночный тормоз, то он должен приводиться только в состоянии покоя двигателя. Следует обратить особое внимание на использование стояночного тормоза при висячих грузах, так как здесь имеется высокий потенциал опасности.
Определенному типу двигателя соответствует тип встроенного датчика. Подчинение датчика и платы управления определенному типу двигателя показано на рисунке 7.1.
При проектировании системы привода необходимо принять следующие решения.
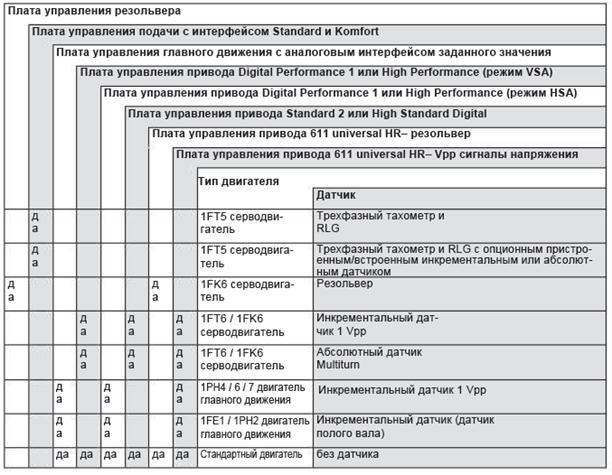
Рисунок 7.1 – Подчинение датчика и платы управления определенному типу двигателя
Во-первых, сразу нужно определиться с организацией измерительной системы – принять косвенную или прямую регистрацию положения рабочего органа привода. Косвенная регистрация положения предусматривает использование датчика, установленного на двигателе, а прямая регистрация строится на использовании линейных или круговых датчиков, устанавливаемых непосредственно на рабочем органе. В приводах главного движения рабочим органом является шпиндель, а в приводах подачи рабочим органом является узел перемещения детали (стол) или перемещения инструмента (суппорт с резцедержателем). Следует учесть, что прямая измерительная система обеспечивает большую точность регистрации положения рабочего органа, так как в следящей системе она охватывает обратной связью все элементы привода. Однако такая система требует установки дополнительных механизмов и устройств.
Во-вторых, при проектировании системы привода необходимо решить вопрос об интерфейсе заданного значения скорости и положения – выбрать аналоговое или цифровое управление.
Следует учитывать, что аналоговое управление применяется для приводов без высоких требований к качеству регулирования, точности позиционирования и динамики.
Рассмотрим варианты косвенной и прямой регистрации скорости и положения с аналоговым и цифровым интерфейсами заданного значения.








