 2014-02-24
2014-02-24 1290
1290Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32), который через датчик повернет ротор сельсина-приемника курса СП.
Последний через необратимую передачу НП поворачивает вал механического дифференциала МД. На второй вал механического дифференциала от штурвала подает-
ся заданное значение курса α . На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
. На выходном (третьем) валу МД получается разность между заданным и истинным значениями курса, которая характеризуется углом откло-
нения отзаданного курса α.
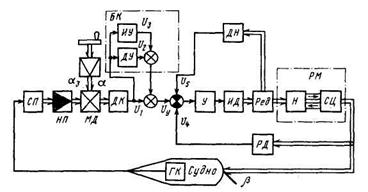
Рис. 10.32. Структурная схема авторулевого
Выходной вал МД поворачивает датчик курса ДК, который вырабатывает напряже
ние
U = k α (10.11),
= k α (10.11),
пропорциональное углу рассогласования судна по курсу. Это напряжение являет-
ся основным управляющим сигналом.
Два других управляющих сигнала вырабатываются в блоке коррекции БК, вклю-
чающем в себя дифференцирующее ДУ и интегрирующее ИУ устройства.
Дифференцирующее устройство вырабатывает сигнал
U  = k d α/ d t (10.12),
= k d α/ d t (10.12),
пропорциональный скорости отклонения от заданного курса. Сигнал этого устройства
предназначен для компенсации энергии поворота судна, т. е. для уменьшения его инер
ции путем отрицательной закладки руля.
Сигнал, вырабатываемый интегрирующим устройством, пропорционален инте
гралу от угла отклонения судна по времени
U = k
= k (10.13),
(10.13),
Этот сигнал возникает при появлении внешних несимметричных сил (волны, ветра) и делает кладки пера руля несимметричными. Тем самым компенсируется снос судна с курса в результате действия односторонних сил.
Таким образом на входе усилителя У суммируются 3 сигнала (пропорциональный углу отклонения судна, его производной и интегралу), образуя напряжение управления
U = k α+ k d α/ dt + k (10.14),.
= k α+ k d α/ dt + k (10.14),.
Поэтому закон регулирования напряжения U в сокращенном виде записывают так ПИД. Это означает, что напряжение управления имеет 3 составляющие - пропорциональ
в сокращенном виде записывают так ПИД. Это означает, что напряжение управления имеет 3 составляющие - пропорциональ
ную (П) в виде напряжения U, интегральную (И) в виде напряжения U, идифферен
циальную (Д) в виде напряжения U .
Напряжение управления U подается на вход усилителя У, откуда усиленный сиг-
нал поступает на исполнительный двигатель ИД, который поворачивает управляющий орган насоса Н рулевой машины РМ.
Насос рулевой машины в соответствии с положением управляющего органа при
водит в движение поршни силовых цилиндров СЦ, которые будут поворачивать руль на угол β.
При повороте руля приходит в движение рулевой датчик РД, имеющий механи-
ческую связь с баллером, вырабатывающий сигнал отрицательной обратной связи
U = kβ (10.15),.
= kβ (10.15),.
Этот сигнал вычитается из управляющего сигнала, а поэтому ограничивает угол перекладки руля и вместе с сигналом U обеспечивает удержание судна на заданном кур
се (по закону незатухающих колебаний).
Исполнительный двигатель ИД связан с управляющим органом насоса через исполнительный механизм. В зависимости от типа РМ в комплект авторулевого может входить исполнительный механизм ИМ-1 или ИМ-2.
В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый угол ε, а в приборе ИМ-2 выходной валик совершает поступательное перемещение на некоторую величину l.
Значение смещения определяет подачу насоса, а соответственно и скорость пере
кладки руля. Таким образом,
ε = kdβ/dt (10.16) ,,
поэтому датчик ДН обратной связи по насосу, механически связанный с ИД, выра
батывает сигнал
U = kkdβ/d (10.17),
= kkdβ/d (10.17),
Этот сигнал отрицательной обратной связи вычитается из управляющего сигна-
ла и служит для уменьшения автоколебаний пера руля.
Процесс управления судном для удержания его на заданном курсе можно представить следующим образом.
При отклонении судна от заданного курса выработанный авторулевым управля-
ющий сигнал поступает через усилитель на ИД. Последний приводит в движение управ-
ляющий орган и датчик ДН, вырабатывает сигнал U, который вычитается из управляю-
щего сигнала усилителя.
Когда при определенном смещении управляющего органа насоса значение сигна-
ла отрицательной обратной связи станет равным управляющему сигналу на входе уси-
лителя, разность напряжений станет равной нулю, а следовательно, и напряжение, подаваемое на ИД, тоже станет равным нулю.
Двигатель остановится, а управляющий орган насоса будет повернут на опреде-
ленный угол. Насос рулевой машины в соответствии с управляющим органом приведет в движение поршни СЦ рулевой машины, которые будут поворачивать руль.
При повороте руля рулевой датчик РД вырабатывает сигнал U, который вычитается из управляющего сигнала усилителя.
Поскольку в рассматриваемый момент разность сигналов на усилителе была рав-
на нулю, то под действием сигнала обратной связи РД усилитель будет вырабатывать напряжение противоположной фазы, ротор ИД будет вращаться в обратную сторону и перемещать управляющий орган насоса к нулевому положению.
При этом сигнал U обратной связи датчика ДН насоса будет соответственно уменьшаться.
Когда управляющий орган насоса вернется в нулевое положение, рулевая маши-
на прекратит движение, руль остановится в определенном положении, сигнал датчика ДН будет равен нулю, сигнал датчика РД будет равен по значению управляющему напря
жению U и противоположен по знаку. Разность сигналов на входе усилителя опять бу-
дет равна нулю.
Под действием момента, создаваемого рулем, судно начнет возвращаться на за-
данный курс и в связи с этим значение управляющего напряжения U уменьшается. Это приводит к нарушению равенства сигналов и под действием напряжения, определяемого полярностью сигнала U рулевого датчика, ИД начинает смещать регулирующий орган насоса в противоположную сторону.
В результате обеспечивается возврат руля в диаметральную плоскость, когда судно оказывается на заданном курсе.








