 2014-02-24
2014-02-24 1389
1389Система следящего управления гидравлическим рулевым приводом
Работа схемы
Пусть необходимо положить руль на левый борт.
При нажатии сдвоенной кнопки S2 «Лево» образуется цепь тока через независи-
мую обмотку возбуждения генератора L1С:
плюс» на левом выводе V1 – S6.5 – S2.1(верхний) – S1.2 – S7 - L1С (параллельно – через R4) - R1 – S1.1 (нижний) – S2.2 (нижний) – S6.7 – L1 - «минус» на правом выводе V1.
Генератор G возбуждается, исполнительный двигатель М2 начинает перекладывать перо руля.
Перекладка продолжается до тех пор, пока не будет отпущена кнопка S2 или (если эта кнопка своевременно не отпущена) не разомкнётся контакт конечного выключателя S7 «Лево».
Аналогично работает схема при нажатии кнопки S1 «Право».
Если надо ускорить кладку, нажимают кнопку S3 «Быстрее», которая шунтирует резистор R1. Ток возбуждения генератора в обмотке L1C и напряжение генератора G увеличиваются, скорость перекладки возрастает.
С баллером руля механически связаны путевые выключатели S7, S8 и S9. Если перо руля находится в диаметральной плоскости, замкнуты контакты S8, горит лампочка Н4 белого цвета.
C началом кладки руля вправо контакт S8 размыкается (гаснет лампочка Н4) и замыкается контакт S7, загорается лампочка Н3 зелёного цвета.
При перекладки руля влево контакт S8 размыкается (гаснет лампочка Н4), замыка
ется контакт S9, загорается лампочка Н5 красного цвета.
Лампочки Н3, Н4, Н5 встроены в верхнюю часть рулевой тумбы, по ним рулевой матрос контролирует фактическое направление перекладки пера руля.
По Правилам Регистра, конечные выключатели S7 и S8 прекращают кладку пера руля при углах 32-33º.
Бесконтактная схема управления гидравлическим рулевым приводом применяется
на пассажирских судах типа «Александр Пушкин».
На рис. 10.27 показана схема только следящего управления.
Силовая часть схемы
Силовая часть схемы включает в себя:
1. ИД1 – приводной двигатель, вращающий насос переменной производительно-
сти (насос Холла).
Схема управления
Схема управления включает в себя:
1. Тр1 – силовой трасформатор 380 / 220 В;
2. Тр2 – трансформатор питания обмоток управления ОУ1…ОУ4 магнитных усилителей МУ1…МУ4;
3. сельсин-трансформатор поста управления ПУ;
4. сельсин-трансформатор насоса Холла ОС2 (второй датчик обратной связи);
5. тахогенератор ТГ;
6. сельсин-трансформатор руля ОС1 (первый датчик обратной связи);
7. серводвигатель руля СР;
8. магнитные усилители МУ1….МУ4;
9. выпрямительные мостики 8 и 9 (в учебнике Головина «Судовые электрические приводы» неправильно обозначены как ФЧВ, т.е. фазочувствительный выпрямитель).
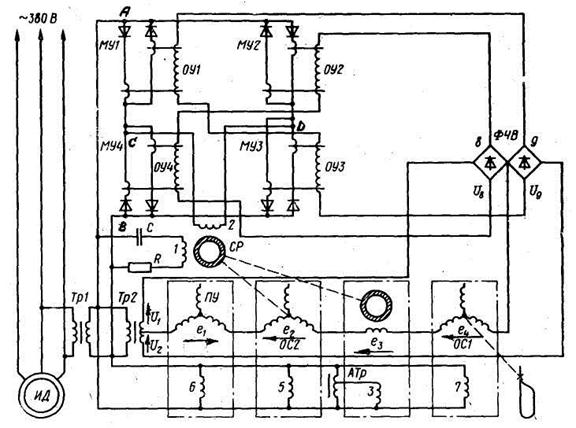
Рис. 10.27. Схема следящего управления РЭП судов типа «А. Пушкин»
Силовой трансформатор Тр1
Первичная обмотка трансформатора подключена к фидеру напряжением 380 В, питающему приводной двигатель ИД насоса Холла.
От вторичной обмотки Тр1 питаются 4 цепи:
1. цепи параллельно включенных обмоток возбуждения:
а) сельсина-трансформатора поста управления ПУ – обмотка 6;
б) сельсина-трансформатора ОС2 насоса Холла – обмотка 5;
в) тахогенератора ТГ – обмотка 3 (эта обмотка включена через небольшой автотрансформатор АТр, позволяющий регулировать напряжение на ней);
г) сельсина-трансформатора руля ОС1 – обмотка 7;
2. первичная обмотка трансформатора ТР2;
3. обмотка возбуждения 1 серводвигателя руля СР (последовательно с ней вклю-
чены конденсатор С и резистор R);
4. цепи рабочих обмоток реверсивного магнитного усилителя, построенного на четырех магнитных усилителях МУ1…МУ4.
Электрические машины в схеме
Сельсин-трансформатор поста управления ПУ
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 6, на роторе – трехфазная обмотка, соединенная в звезду (рис. 10.27).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен со штурвалом.
Этот сельсин предназначен для получения напряжения, пропорционального углу поворота штурвала.
Если штурвал, а значит, и ротор сельсина находятся в нулевом положении, выход-
ная ЭДС сельсина е1 = 0.
Если штурвал повернуть в определенную сторону, на выходе сельсина ПУ появит-
ся ЭДС е1, величина которой пропорциональна углу поворота штурвала, а фаза зависит от направления поворота штурвала.
Иначе говоря, если штурвал повернуть в другую сторону относительно нулевого положения, фаза ЭДС е1 изменится на 180º.
Сельсин-трансформатор насоса Холла ОС2
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 5, на роторе – трехфазная обмотка, соединенная в звезду (рис. 10.27).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен с ротором серводвига-
теля руля СР (на схеме эта связь показана пунктирной линией между роторами СР и ОС2).
Ротор СР механически (через тягу манипулятора насоса Холла) связан с бараба-
ном насоса Холла, значит, ротор сельсина ОС2 также связан механически с барабаном насоса Холла.
Этот сельсин предназначен для получения напряжения, пропорционального смеще
нию барабана насоса Холла (эксцентриситету насоса).
Если барабан насоса, а значит, и ротор сельсина находятся в нулевом положении, выходная ЭДС сельсина е2 = 0.
Если барабан насоса выведен из нулевого положения в определенную сторону, на выходе сельсина ОС2 появится ЭДС е2, величина которой пропорциональна эксцентриси-
тету насоса, а фаза зависит от направления смещения барабана.
Иначе говоря, если барабан сместить в другую сторону относительно нулевого положения, фаза ЭДС е2 изменится на 180º.
Напомним, что чем больше эксцентриситет насоса, тем больше подача (давление) насоса и тем больше скорость перекладки пера руля.
Тахогенератор ТГ
Состоит из статора и полого ротора (на рис. 10.27 заштрихован). На статоре нахо-
дятся две обмотки, сдвинутые в пространстве по углом 90º - обмотка возбуждения 3 и выходная обмотка с ЭДС е3 . Ротор механически связан с валом серводвигателя руля СР (эта связь показана при помощи пунктирной линии между роторами СР и ТГ).
Тахогенератор предназначен для получения ЭДС е3, прямо пропорциональной ско
рости вращения вала серводвигателя СР
Действительно, из формулы ЭДС е3 = с*ω*Ф следует, что при постоянном магнит-
ном потоке Ф обмотки возбуждения 3 эта ЭДС е3 ≡ ω.
При изменении направления вращения ротора тахогенератора фаза ЭДС е3 изменя-
ется на 180 электрических градусов.
Основной характеристикой тахогенератора является зависимость выходного напря
жения Uвых (в данном случае – выходной ЭДС е3 ) от скорости вращения ротора ω (рис. 10.28).
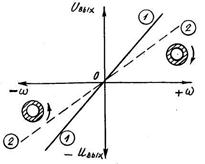
Рис. 10.28. Зависимость выходного напряжения тахогенератора от скорости враще-
ния ротора при полном (характеристика 1) и ослабленном магнитном потоке (ха-
рактеристика 2).
Характеристика имеет две особенности:
1. величина выходного напряжения Uвых прямо пропорциональна скорости враще-
ния ротора ω, поэтому график характеристики представляет собой прямую линию;
2. при изменении направления вращения ротора тахогенератора (реверсе) фаза переменного выходного напряжения Uвых изменяется на 180 электрических градусов (см. участок характеристики, расположенный в третьем квадранте).
В данной схеме (рис. 10.27) при помощи автотрансформатора АТр можно изменять магнитный поток возбуждения тахогенератора.
Пусть характеристика 1 получена при полном магнитном потоке Ф тахогенератора (ползунок АТр находится в крайнем верхнем положении).
Если при помощи автотрансформатора АТр уменьшить магнитный поток возбужде
ния тахогенератора (переместить ползунок АТр вниз), то, как следует из формулы ЭДС е3 = с*ω*Ф, значения этой ЭДС при тех же (т.е. одинаковых) скоростях вращения ротора будут меньше, чем при полном магнитном потоке.
Поэтому ослабленному магнитному потоку обмотки возбуждения 3 соответствует характеристика 2.
Сельсин-трансформатор руля ОС1
Состоит из статора и ротора. На статоре находится однофазная обмотка возбужде-
ния 6, на роторе – трехфазная обмотка, соединенная в звезду. Из трех фазных обмоток одна не используется, поэтому две другие по схеме соединены последовательно.
Ротор сельсина-трансформатора ОС1 механически соединен с баллером руля.
Этот сельсин предназначен для получения напряжения, пропорционального углу поворота пера руля.
Если перо руля в диаметральной плоскости, значит, ротор сельсина находится в нулевом положении, выходная ЭДС сельсина е4 = 0.
Если перо руля повернется в определенную сторону, на выходе сельсина появит-
ся ЭДС е4, величина которой пропорциональна углу поворота пера руля, а фаза зависит от направления поворота пера руля.
Иначе говоря, если перо руля будет повернуто в другую сторону относительно нулевого положения, фаза ЭДС е4 изменится на 180º.
Серводвигатель руля СР
Состоит из статора и полого ротора, который на рис. 10.27 заштрихован. На статоре находятся две обмотки - обмотка возбуждения 1 и обмотка управления 2.
Обмотка возбуждения 1 получает питание от вторичной обмотки трансформатора Тр1, обмотка управления 2 получает питание с выхода мостовой схемы на четырех магнит
ных усилителях (устройство и принцип действия мостовой схемы отдельно объясняется ниже).
Основной характеристикой серводвигателя является зависимость скорости враще-
ния ротора СР ω от напряжения управления Uу на обмотке 2 (рис. 10.29).
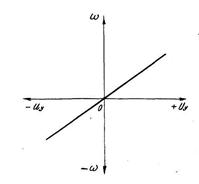
Рис. 10.29. Зависимость скорости вращения ротора серводвигателя руля СР от напряжения на обмотке управления 2
Этот серводвигатель предназначен для перемещения (через гидроусилитель, на рис. 10.27 не показан) барабана насоса Холла.
Чем быстрее вращается ротор, тем быстрее перемещается барабан насоса Холла, тем быстрее нарастает давление в системе гидравлики рулевой, тем больше скорость перекладки пера руля.
С одной стороны, это хорошо, но с другой быстрое нарастание давления в системе гидравлики может вызвать гидравлический удар, при котором возможно повреждение клапанов и даже разрыв масляного трубопровода.
Чтобы избежать таких ударов, в схеме используется тахогенератор ТГ, который уменьшает скорость вращения ротора СР и тем самым позволяет избежать возникновения гидравлических ударов. Более подробное объяснение действия тахогенератора в схеме приведено ниже.
Реверсивный магнитный усилитель
Устройство
Реверсивный магнитный усилитель состоит из четырех магнитных усилителей МУ1…МУ4, включенных по так называемой мостовой схеме (рис. 10.27).
Эта схема изображена в несколько ином виде на рис. 10.30.
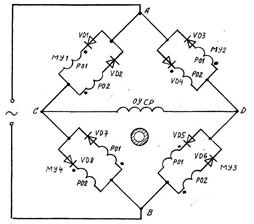
Рис. 10.30. Мостовая схема реверсивного магнитного усилителя
Как известно из курса электротехники, мостовой называется схема, имеющая четы-
ре «плеча» и две диагонали.
Применительно к данной схеме, «плечами» являются четыре магнитных усилителя МУ1…МУ4, а диагоналями – питающая (с точками «А» и «В») и выходная (с точками «С» и «D»).
На входную диагональ (точки «А» и «В») подается напряжение 127 В со вторич-
ной обмотки трансформатора Тр1, с выходной (точки «В» и «С») снимается напряжение на обмотку управления 2 серводвигателя руля СР.
На рис. 10.30 обмотки управления ОУ магнитных усилителей МУ1…МУ4 не показаны.
Магнитные усилители
На сердечнике каждого магнитного усилителя (рис. 10.27), например, МУ1, нахо-
дятся две рабочие обмотки РО1 и РО2 и обмотка управления ОУ.
Рабочие обмотки при помощи диодов VD1 и VD2 включены по схеме с внутренней положительной обратной связью.
Суть этой схемы состоит в том, что рабочие обмотки из-за диодов пропускают ток поочередно, каждая в «свою» половину периода переменного напряжения. Иначе говоря, ток в любой рабочей обмотке – выпрямленный однополупериодный.
Как известно из курса электротехники, такой ток имеет две составляющие:
1. переменную с частотой 50 Гц;
2. постоянную.
Переменная состаляющая тока позволяет рабочей обмотке сохранить индуктивное сопротивление Xl = 2π*f*L, где f = 50 Гц, L – индуктивность рабочей обмотки.
Постоянная же составляющая создает дополнительное (помимо обмотки управле-
ния ОУ) подмагничивание сердечника МУ и тем самым увеличивает коэффициент усиле-
ния МУ по току.
Обмотки управления ОУ1…ОУ4 (рис. 10.27) включены попарно-последовательно на выходные напряжения мостиков 8 и 9: с выхода мостика 8 питаются обмотки ОУ2 и ОУ4, с выхода мостика 9 – обмотки ОУ1 и ОУ3.
Принцип действия
В исходном состоянии выпрямленные мостиками напряжения U8 и U9 одинаковы, т.е. U8 = U9 (рис. 10.27).
В этом случае токи управления во всех четырех обмотках управления ОУ1……О4 также одинаковы. Это означает, что степень подмагничивания сердечников магнитных усилителей одинакова, т.е. одинаковы индуктивные сопротивления всех восьми рабочих обмоток РО1…РО2.
При этом мост уравновешен, выходное напряжение между точками «С» и «D» рав-
но нулю (точка «0» на рис. 10.31).
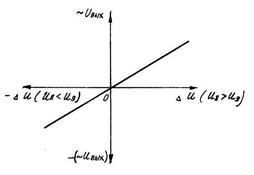
Рис. 10.31. Зависимость выходного напряжения мостовой схемы
(на обмотке 2 СР) от соотношения между напряжениями U8 и U9
Поскольку это напряжение снимается на обмотку управления 2 серводвигателя руля, серводвигатель не вращается.
Если в результате поворота штурвала (см. ниже) напряжение U8 увеличится, а напряжение U9 уменьшится, ток в обмотках управления ОУ2 и ОУ4 увеличится, а в обмотках ОУ1 и ОУ3 уменьшится.
При этом индуктивные сопротивления рабочих обмоток усилителей МУ2 и МУ4 уменьшатся, а усилителей МУ1 и МУ3 увеличатся.
В результате на выходе магнитного усилителя (точки «С» и «D») появится напря-
жение определенной фазы, величина которого тем больше, чем больше отличаются напря
жения U8 и U9 (на рис. 10.31 – это участок характеристики в первом квадранте). Ротор серводвигателя станет вращаться в определенном направлении.
Если штурвал повернуть в другую сторону, наоборот, напряжение U8 уменьшится, а напряжение U9 увеличится. Мост снова выйдет из уравновешенного состояния, но при этом фаза выходного напряжения на обмотке управления 2 серводвигателя изменится на 180º (на рис. 10.31 – это участок характеристики в третьем квадранте).
В результате ротор серводвигателя станет вращаться в противоположном направ-
лении.

