 2014-02-24
2014-02-24 6419
6419В данном разделе мы рассмотрим группу ОЭПиС с общей технологией получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеивания в прозрачных и полупрозрачных средах.
Эту группу оптических приборов объединяют под названием- Лида́р (транслитерация LIDAR англ. Light Identification, Detection and Ranging).
Устоявшийся перевод LIDAR как «лазерный радар» не вполне корректен, так как впервые аббревиатура LIDAR появилась в работе Миддлтона и Спилхауса «Метеорологические инструменты» 1953 года, задолго до изобретения лазеров. Первые лидары использовали в качестве источников света обычные или импульсные лампы со скоростными затворами, формировавшими короткий импульс. В современных системах ближнего радиуса действия (например, предназначенных для работы в помещениях) вместо лазеров используют обычные светодиоды. Однако именно применение лазера (обусловленное его свойствами: когерентности, высокой плотность и мощности излучения) позволило создать приборы с радиусами действия от сотен метров до сотен километров.
Первые полевые испытания носимого лазерного дальномера XM-23 с мощностью излучения 2.5 Вт и диапазоном измеряемых расстояний 200-9995 м прошли в 1963 году. Тогда же, в первой половине 1960-х годов, начались опыты по применению лидара с лазерным излучателями для исследования атмосферы. В 1969 году лазерный дальномер и мишень, установленная на Аполлоне-11, применялся для измерения расстояния от Земли до Луны. Четыре мишени, доставленные на Луну тремя «Аполлонами» и «Луноходом-2», и по сей день используются для наблюдения за орбитой Луны. В течение 1970-х годов, с одной стороны, отлаживалась технология лазерных дальномеров и компактных полупроводниковых лазеров, а с другой — были начаты исследования рассеяния лазерного луча в атмосфере..
Рассмотрение этой группы оптических приборов начнём с простейшего представителя-лазерного дальномера. Принцип работы основан на способности электромагнитного излучения распространяться с постоянной скоростью, что позволяет определять дальность до объекта. Так, при импульсном методе дальнометрирования используется следующее соотношение:

|
где R — расстояние до объекта, c — скорость света в вакууме, n — показатель преломления среды, в которой распространяется излучение, t — время прохождения импульса до цели и обратно.
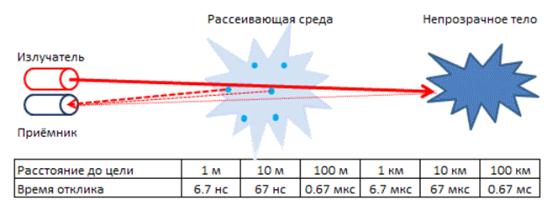
Рисунок 132 Принцип работы лазерного дальномера.
Рассмотрение этого соотношения показывает, что потенциальная точность измерения дальности определяется точностью измерения времени прохождения импульса энергии до объекта и обратно. Ясно, что чем короче импульс, тем лучше. Задача определения расстояния между дальномером и целью сводится к измерению соответствующего интервала времени между зондирующим сигналом и сигналом, отраженным от цели. Различают три метода измерения дальности в зависимости от того, какой характер модуляции лазерного излучения используется в дальномере: импульсный, фазовый или фазо-импульсный.
Сущность импульсного метода дальнометрирования состоит в том, что к объекту посылают зондирующий импульс, он же запускает временной счетчик в дальномере. Когда отраженный объектом импульс приходит к дальномеру, то он останавливает работу счетчика. По временному интервалу (задержке отраженного импульса) определяется расстояние до объекта.
При фазовом методе дальнометрирования лазерное излучение модулируется по синусоидальному закону с помощью модулятора (электрооптического кристалла, изменяющего свои параметры под воздействием электрического сигнала). Обычно используют синусоидальный сигнал с частотой 10…150 МГц (измерительная частота). Отраженное излучение попадает в приемную оптику и фотоприемник, где выделяется модулирующий сигнал. В зависимости от дальности до объекта изменяется фаза отраженного сигнала относительно фазы сигнала в модуляторе. Измеряя разность фаз, определяют расстояние до объекта.
Общая структурная схема простейшего лидара представлена на рисунке 133 и схожа с прибором ночного видения, в современной военной технике они даже совмещаются.

Рисунок 133. Общая структурная схема простейшего лидара (1-лазер, 2-объект, 3-блок приёмника, 4- оптическая система ПОИ(телескопическая система), 5-ПОИ, 7-блок обработки и анализа, 7-блок вывода информации, 8- блок управления лазером.
На рисунке 134 представлен современный россий ский лазерный дальномер "Сажень-ТМ-Д" служащий для определения дальности до космических аппаратов, оснащенных лазерными ретрорефлекторами, и измерения угловых координат КА по отраженному солнечному излучению для расчета высокоточных параметров движения КА, а также получения фотометрической информации в видимом диапазоне длин волн.
ский лазерный дальномер "Сажень-ТМ-Д" служащий для определения дальности до космических аппаратов, оснащенных лазерными ретрорефлекторами, и измерения угловых координат КА по отраженному солнечному излучению для расчета высокоточных параметров движения КА, а также получения фотометрической информации в видимом диапазоне длин волн.
В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеиванию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах.
Рисунок 134 Дальномер "Сажень-ТМ-Д"
Именно измерение интенсивности рассеяния лазерного излучения аэрозолем атмосферы дало второй сильный толчок для дальнейшего развития. Лидар посылает в атмосферу короткий импульс света и принимает обратно сигнал обратного рассеяния. Рассеяние света в атмосфере происходит как молекулами воздуха (Релеевское рассеяние), так и частицами аэрозоля. Таким образом, наличие аэрозоля в атмосфере увеличивает сигнал обратного рассеяния по сравнению с чистой атмосферой и концентрация аэрозоля может быть определена как функция расстояния и интенсивности сигнала на фоне чистой атмосферы. Несмотря на тот факт, что аэрозоли составляют не более 10 % от общей массы антропогенных загрязнителей атмосферы, потенциальный ущерб от этого типа загрязнителей, которые, как правило, представляют собой сильные токсиканты, существенно больше. «Атмосферные» лидары способны не только определять расстояния до непрозрачных отражающих целей, но и анализировать свойства прозрачной среды, рассеивающей свет. Разновидностью атмосферных лидаров являются доплеровские лидары, определяющие направление и скорость перемещения воздушных потоков в различных слоях атмосферы.
Физические принципы работы атмосферных лидаров мы с вами подробно рассматривали в разделе ИК газоанализаторов. Здесь мы остановимся на конструктивных особенностях лидаров данного типа. В качестве примера рассмотрим современную методику многоволнового лазерного дистанционного анализа опасных загрязнений атмосферы. Особенность заключается в том что лазерные источники могут одновременно генерировать излучение на нескольких длинах волн в одном направлении. Это позволяет:
• проводить обнаружение и измерение концентраций нескольких компонент опасных примесей (до 6) одновременно в реальном масштабе времени;
• существенно повысить точность измерения концентрации опасных примесей за счет уменьшения влияния временных флуктуаций принимаемого сигнала, обусловленных турбулентностью атмосферы.
 В многоволновом лидаре в качестве базовых лазерных систем применяются импульсно-периодические лазеры на CO2 и изотопах молекулы CO2 (диапазон 9-11 мкм), а также могут использоваться их вторые (диапазон 4.5-5.5 мкм) и третьи (диапазон 3.0-3.4 мкм) гармоники, полученные при преобразовании частоты излучения базовых лазеров в нелинейных кристаллах типа AgGaSe2 или ZnGeP2 с эффективностью преобразования 5-10%. Принципиальным отличием от используемых в настоящее время стандартных схем дифференциального лазерного газоанализа, в которых определяемые компоненты воздуха детектируется одна за другой, в многоволновых лазерных системах они могут определяться практически одновременно за счет выхода в генерацию набора аналитических длин волн одновременно и их одновременного детектирования после прохождения атмосферного объема с повышенной концентрацией нескольких опасных газообразных веществ.
В многоволновом лидаре в качестве базовых лазерных систем применяются импульсно-периодические лазеры на CO2 и изотопах молекулы CO2 (диапазон 9-11 мкм), а также могут использоваться их вторые (диапазон 4.5-5.5 мкм) и третьи (диапазон 3.0-3.4 мкм) гармоники, полученные при преобразовании частоты излучения базовых лазеров в нелинейных кристаллах типа AgGaSe2 или ZnGeP2 с эффективностью преобразования 5-10%. Принципиальным отличием от используемых в настоящее время стандартных схем дифференциального лазерного газоанализа, в которых определяемые компоненты воздуха детектируется одна за другой, в многоволновых лазерных системах они могут определяться практически одновременно за счет выхода в генерацию набора аналитических длин волн одновременно и их одновременного детектирования после прохождения атмосферного объема с повышенной концентрацией нескольких опасных газообразных веществ.
Схема применения лидара на основе многоволнового аммиачного лазера для контроля атмосферы приведен на рисунке 135. Блок – схема многоволнового лидара и его принципиальная оптическая схема приведены на рисунках 136 и 137.
 Рисунок 135. Схема применения многоволнового лидара
Рисунок 135. Схема применения многоволнового лидара
Рисунок 136. Блок – схема многоволнового лидара
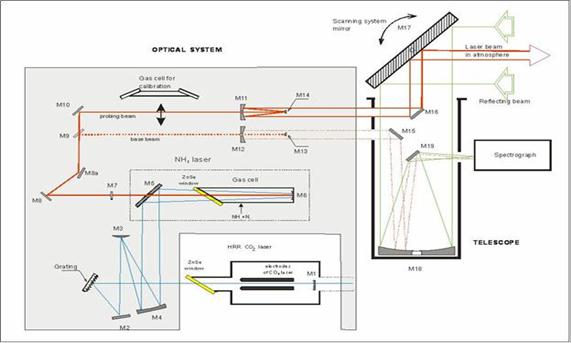
Рисунок 137. Принципиальная оптическая схема многоволнового лидара
(М – зеркала)
Многоволновой газоанализатор (дальность действия до 10км.), использующий новейшие методы дистанционного контроля, может эффективно использоваться в самых различных сферах производства и жизнедеятельности: контроль выбросов в атмосферу вблизи опасных химических производств;
• контроль за газовыми и/или утечками на предприятиях ЯТЦ;
• выявление предаварийных ситуаций, отслеживание обстановки по загрязненности атмосферы при аварийных ситуациях;
• обеспечение безопасности важных объектов - правительственных зданий, военных объектов, АЭС и т.п.
• дистанционный контроль (например, с борта самолета или беспилотного спутника) выбросов газов с объектов атомной промышленности в третьих странах с целью их идентификации, и следовательно, определения возможности этих стран по производству ядерного оружия;
• определение динамики распространения ядовитых облаков в атмосфере при широкомасштабных авариях;
На рисунке 138 представлены двухволновый лидар ЛСА-2с и одноволновой лидар 4Р предназначенных для зондирования атмосферных аэрозолей и облаков.
Они имеют те же основные характерные блоки для лидаров:
-лазер-передатчик;
-передающая оптическая система;
-приемная оптическая система;
-спектроанализирующее и регистрирующее устройство (ФЭУ, CCD — камера, лавинный фотодиод);
-блок обработки сигнала;
-блок управления;
-система отображения полученной информации.

Рисунок 138. Двухволновый лидар ЛСА-2с и одноволновой лидар 4Р.
Как мы уже отмечали, основным излучателем в лидарах является лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчётный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн (в нанометрах):
§ 1550 нм — инфракрасное излучение, невидимое ни глазу человека, ни типичным приборам ночного видения. Глаз не способен сфокусировать эти волны на поверхности сетчатки, поэтому травматический порог для волны 1550 существенно выше, чем для более коротких волн. Однако риск повреждения глаз на деле выше, чем у излучателей видимого света — так как глаз не реагирует на ИК излучение, то не срабатывает и естественный защитный рефлекс человека
§ 1064 нм — ближнее инфракрасное излучение неодимовых и иттербиевых лазеров, невидимое глазу, но обнаружимое приборами ночного видения
§ 532 нм — зелёное излучение неодимового лазера, эффективно «пробивающее» массы воды
§ 355 нм — ближнее ультрафиолетовое излучение
Задачи решаемые применением Лидаров:
· Исследования атмосферы
Исследования атмосферы стационарными лидарами остаётся наиболее публичной отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
· Измерение скорости и направления воздушных потоков.
Теоретическое обоснование применения наземного доплеровского лидара для таких измерений было дано ещё в 1980-е годы. Принцип действия основан на использовании эффекта Доплера, согласно которому, частота принятого сигнала, отражённого от цели может отличаться от частоты излучённого сигнала и разница зависит от соотношения скоростей объектов относительно друг друга. В 2001 Alcatel предложил размещение лидаров на борту спутников, так, что «созвездие» спутников на орбите способно отслеживать движение воздушных масс в рамках целого континента, а в потенциале — на Земле в целом.
· Измерение температуры атмосферы. Разработано и реализовано на практике несколько основных методов измерения профилей температуры.
В первом методе используется резонансное рассеяние на атомах щелочных металлов, в частности, натрия, калия, а также железа. Облака атомов металлов находятся на высоте 85 — 100 км. Температура измеряется по доплеровскому уширению резонансных линий с помощью зондирования узкополосным подстраиваемым лазером. Первые измерения были осуществлены с помощью искусственных натриевых облаков, забрасываемых в атмосферу ракетами. Несмотря на то, что метод ограничен диапазоном высот, на которых присутствуют атомы металла, рассеянный сигнал оказывается относительно большим, и это дает возможность измерять температуру с точностью до 1.5 ˚К.
Второй метод — метод рэлеевского рассеяния (Rayleigh lidar), основан на нерезонансном рассеянии света на молекулах воздуха. Впервые он был применен в 1953 году в опытах с прожекторным зондированием атмосферы. Суть метода заключается в следующем. Если отсутствует аэрозольное рассеяние, то мощность обратно рассеянного сигнала прямо пропорциональна плотности воздуха, из которой можно расcчитать температуру. Разрежение воздуха с высотой позволяет использовать метод рэлеевского рассеяния на высотах не более 90 км. Нижняя граница высоты измерения (около 20-30 км) обусловлена присутствием в граничном слое большого количества аэрозоля, который значительно увеличивает рассеяние, но практически не влияет на плотность воздуха.
Третий метод основан на вращательном рамановском (комбинационном) рассеянии молекулами воздуха (Raman lidar). Когда температура увеличивается, интенсивность переходов с большими квантовыми числами возрастает, в то время как интенсивность линий вращательного рамановского спектра, соответствующих маленьким квантовым числам, уменьшается. Переходы с большими квантовыми числами соответствуют линиям рамановского спектра, расположенным дальше от центральной частоты. Температура определяется при использовании измерений в двух областях спектра с различной температурной зависимостью. Максимальная высота зондирования составляет около 30 км, погрешность измерения менее 1 ˚К до высоты 10 км[19]. Так как в приемнике линия упругого рассеяния подавляется, то измерения можно проводить и в присутствии значительных концентраций аэрозолей.
· Раннее оповещение о лесных пожарах.
| Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе, порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п. |
· Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы. Первый полноценный орбитальный лидар был выведен на орбиту NASA в декабре 1994 года в рамках программы LITE (Lidar In-Space Technology Experiment). Двухтонный лидар LITE с метровым зеркальным телескопом, поднятый на высоту 260 км, «рисовал» на земле размытое пятно диаметром 300 м, что было явно недостаточно для эффективного отображения рельефа, и был исключительно «атмосферным».
· Космическая геодезия.
Сканируют рельеф земной поверхности с приемлемой разрешающей способностью.
· Авиационная геодезия.
Национальная океанографическая служба США (NOAA) систематически применяет авиационные лидары для топографической съёмки морского побережья.
Особое направление, применяемое на практике в сейсмоопасных районах США — дифференциальное измерение высот с целью выявления локальных подвижек земных масс в районе разломов. Ещё в 1996 с помощью лидара была открыта неизвестная ранее зона разлома возле Сиэтла.
Совсем не давно с помощью подобного лидара группе ученых из Хьюстонского университета возможно, удалось найти в джунглях Гондураса легендарный Золотой город.
Рисунок 139 Применениепрежде засекреченной военными
технологию лазерного картографирования.
· Строительство и горное дело
Строительство — обмеры зданий, контроль отклонения плоскостей стен и несущих колонн от вертикали (в том числе в динамике), анализ вибраций стен и остекления. Обмеры котлованов, создание трёхмерных моделей стройплощадок для оценки объёмов земляных работ.
Архитектура — построение трёхмерных моделей городской среды для оценки влияния предлагаемых новостроек на облик города.
· Морские технологии
Измерение глубины моря. Для этой задачи используется дифференциальный лидар авиационного базирования. Красные волны почти полностью отражаются поверхностью моря, тогда как зелёные частично проникают в воду, рассеиваются в ней, и отражаются от морского дна. Технология пока не применяется в гражданской гидрографии из-за высокой погрешности измерений и малого диапазона измеряемых глубин.
Поиск рыбы. Аналогичными средствами можно обнаруживать признаки косяков рыбы в приповерхностных слоях воды. Специалисты американской государственной лаборатории ESRL утверждают, что поиск рыбы лёгкими самолётами, оборудованных лидарами, как минимум на порядок дешевле, чем с судов, оборудованных эхолотами.
Системы подводного зрения. У истоков подводного применения лидаров на море стояла корпорация Kaman, запатентовавшая работоспособную технологию в 1989 году. Интенсивное (по сравнению с воздушной средой) рассеивание света в воде долгое время ограничивало действие подводных лидаров десятками метров. Импульс лазера способен «пробить» и большие расстояния, но при этом полезный отражённый сигнал оказывается неразличим на фоне паразитной засветки. Kaman преодолела эту проблему с помощью электронных затворов, открывавших оптический путь к CCD-приёмнику только на короткий период ожидаемого отклика.
· Промышленные и сервисные роботы
Системы машинного зрения ближнего радиуса действия для роботов, основанные на сканирующем лидаре IBM, формируют цилиндрическую развёртку с углом охвата горизонта 360° и вертикальным углом зрения до +30..-30
· Военные технологии
Здесь лидары получили самое широкое распространение и выполняют функции ооптико-локационной локации, разведки, наведения на цель итп.
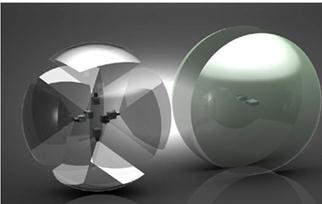
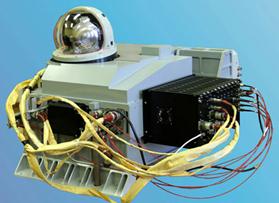
Рисунок 139. Обнаружитель атакующих ракет (ОАР), Оптико-локационная станция ОЛС-35
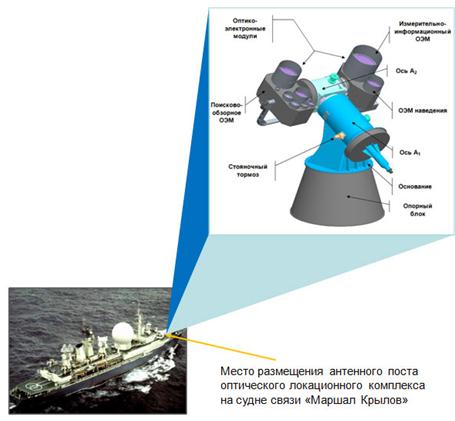
Рисунок 140. Средство национального технического контроля испытаний стратегического вооружения в соответствии с международными Договорами.
4.8 ИНТЕРФЕРОМЕТРЫ
Интерферометры - это измерительные приборы, действие которых основано на явлении интерференции.
Работа приборов построена на последовательном разложение пучка излучения (на два или большее количество когерентных пучков каждый из них проходит различные оптические пути) и последующим их сложением, в результате создаётся интерференционная картина, по которой можно установить смещение фаз пучков.
С помощью интерферометров производится измерение угловых размеров звезд и угловых расстояний между звездами, измерение показателей преломления газов и жидкостей, а также определение концентрации примесей в воздухе. Интерферометры используются для контроля качества оптических деталей и их поверхностей, для контроля чистоты обработки металлических поверхностей.
Так как в основе принципа работы интерферометров лежит явление интерференции света, начнём изучение данной группы приборов с изучения этого явления.
Интерференции света — перераспределение интенсивности света в результате наложения (суперпозиции) нескольких световых волн. Это явление сопровождается чередующимися в пространстве максимумами и минимумами интенсивности. Её распределение называется интерференционной картиной.
Впервые явление интерференции было независимо обнаружено Робертом Бойлем (1627—1691 гг.) и Робертом Гуком (1635—1703 гг.). Они наблюдали возникновение разноцветной окраски тонких плёнок (интерференционных полос), подобных масляным или бензиновым пятнам на поверхности воды. В 1801 году Томас Юнг (1773—1829 гг.), введя «Принцип суперпозиции», первым объяснил явление интерференции света, ввел термин «интерференция» (1803). Он также выполнил первый демонстрационный эксперимент по наблюдению интерференции света, получив интерференцию от двух щелевых источников света (1802); позднее этот опыт Юнга стал классическим.
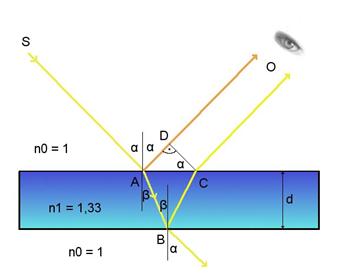
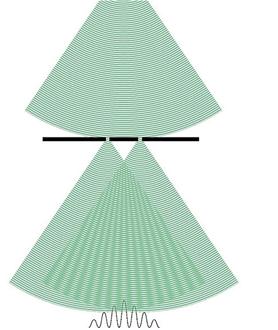
Рисунок 141. Опыт Юнга и Интерференция в тонкой плёнке.
Ещё один метод получения устойчивой интерференционной картины для света служит использование воздушных прослоек, основанное на одинаковой разности хода двух частей волны: одной — сразу отраженной от внутренней поверхности линзы и другой — прошедшей воздушную прослойку под ней и лишь затем отразившейся. Её можно получить, если положить плосковыпуклую линзу на стеклянную пластину выпуклостью вниз. При освещении линзы сверху монохроматическим светом образуется тёмное пятно в месте достаточно плотного соприкосновения линзы и пластинки, окружённое чередующимися тёмными и светлыми концентрическими кольцами разной интенсивности. Тёмные кольца соответствуют интерференционным минимумам, а светлые — максимумам, одновременно тёмные и светлые кольца являются изолиниями равной толщины воздушной прослойки. Измерив радиус светлого или тёмного кольца и определив его порядковый номер от центра, можно определить длину волны монохроматического света. Чем круче поверхность линзы, особенно ближе к краям, тем меньше расстояние между соседними светлыми или тёмными кольцами. Данная методика используется для контроля оптических деталей.
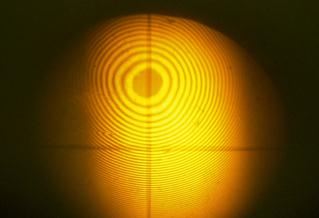
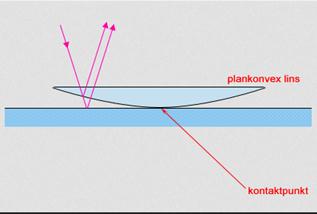
Рисунок 142. Кольца Ньютона
Разобрав явление интерференции, перейдём к рассмотрению схем построения интерферометров.
Интерферометр Майкельсона является одной из наиболее распространенных скелетных схем интерферометра, предназначенной для различных применений в случае, когда пространственное совмещение объектов, порождающих интерферирующие волны, невозможно или в силу каких-то причин нежелательно.
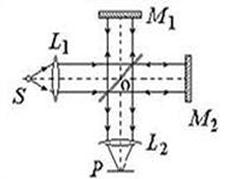
Рисунок 143. Интерферометр Майкельсона
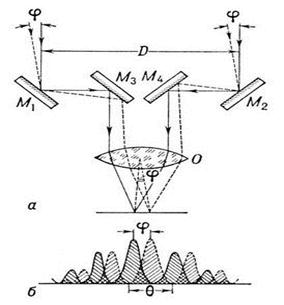
Звездный интерферометр Майкельсона — интерферометр для измерения угловых размеров звёзд и углового расстояний между двойными звёздами. Если угловое расстояние между двумя звездами очень мало, в телескоп они видны как одна звезда. В таком случае говорят о двойных звездах и надо провести специальное наблюдение, чтобы отличить их от звезд одиночных. Для этого используется звездный интерферометр Майкельсона, который позволяет к тому же определить угловое расстояние между звездами.
Рисунок 143.Звёздный интерферометр Майкельсона
Лучи света, пришедшего от удаленной звезды, отражается от плоских зеркал M1 — M2, разнесенных на достаточно большое расстояние D, затем отражаются от двух других зеркал и собираются линзой на экране, помещенном в фокальной плоскости. Разнесенные на расстояние D зеркала можно рассматривать как точечные источники, расстояние между которыми и равно D. Вследствие этого в изображении звезды наблюдается интерференционная картина, аналогичная интерференции от двух щелей, расположенных на расстоянии D друг от друга. Угловое расстояние между соседними интерференционными максимумами в этой картине равно θ=λ/D, где λ – длина волны света. При наличии двух близких звёзд, находящихся на малом угловом расстоянии φ друг от друга, в телескопе образуются 2 интерференционные картины, которые также смещены на угол φ и накладываются друг на друга. В зависимости от соотношения углов θ и φ видимость полос суммарной картины будет различной. Изменяя расстояние D и, следовательно, изменяя угол θ, можно добиться совмещения максимумов одной интерференционной картины с минимумами другой, в результате чего видимость полос будет наихудшей. При этих условиях φ=½θ=λ/2D. Измерив D и зная λ, можно определить угловое расстояние между звёздами φ. Аналогично определяются угловые размеры одной звезды. Если звезду рассматривать как равномерно светящийся диск, то расчёт показывает, что исчезновение полос происходит при φ=1.22λ/D. Точность измерения звёздного интерферометра тем больше, чем больше база D. Построен звездный интерферометр, в котором D может достигать 18 м. что позволяет измерять угловое расстояние с точностью до 0,001". Для измерения угловых размеров очень слабых звёзд, свет от которых на уровне шумов, применяют метод корреляции интенсивностей.
 Интерферометр Рождественского – это двухлучевой интерферометр, состоящий из 2-х зеркал M1, M2 и двух параллельных полупрозрачных пластин P1, P2; M1, P1 и M2, P2 устанавливаются попарно параллельно, но М1 и М2 наклонены относительно друг друга на малый угол; расстояние М1Р1 = М2Р2 и M1P2=P1M2. Луч света разделяется пластиной Р1 на 2 луча, которые после отражений от M1, M2 и прохождения Р2 оказываются параллельными с разностью фаз
Интерферометр Рождественского – это двухлучевой интерферометр, состоящий из 2-х зеркал M1, M2 и двух параллельных полупрозрачных пластин P1, P2; M1, P1 и M2, P2 устанавливаются попарно параллельно, но М1 и М2 наклонены относительно друг друга на малый угол; расстояние М1Р1 = М2Р2 и M1P2=P1M2. Луч света разделяется пластиной Р1 на 2 луча, которые после отражений от M1, M2 и прохождения Р2 оказываются параллельными с разностью фаз
δ = (4πD/λ)(cos i1 — cos i2).
Рисунок 144. Интерферометр Рождественского
Поскольку δ не зависит от положения лучей на зеркалах и определяется лишь углами падения, интерференционная картина будет локализована на бесконечности (или в фокальной плоскости объектива О). Параллельному пучку лучей, падающих на Интерферометр Рождественского, соответствует одна точка интерференционно картины, и, следовательно, для наблюдения всей картины необходим пучок конечной апертуры. Вид картины (порядок и ширина полос, их ориентация) зависит от наклона зеркал M1 и M2. Если, например, ребро двугранного угла, образованного M1 и M2, вертикально (перпендикулярно чертежу), то даже при очень малой разности (i1-i2) полосы сравнительно высокого порядка (D велико) вертикальны и почти параллельны.Если же ребро двугранного угла горизонтально, то в поле зрении находятся горизонтальные полосы низкого порядка (в т.ч. нулевая), видные и в белом свете. Введение в один из пучков к.-л. прозрачного объекта, например пластинки, изменяет ширину, порядок и ориентацию полос: нулевая полоса не горизонтальна и появляется при некоторой промежуточной ориентации M1 и M2; при очень большой толщине этой пластинки в белом свете можно видеть только очень узкие, почти вертикальные полосы, когда ребро угла между M1 и M2 почти вертикально. Ширина полос зависит от угла между M1 и Р1, увеличиваясь с его уменьшением. Если все зеркала и пластины параллельны, то в отсутствие неоднородностей ширина полос бесконечна (интерференционное поле равномерно освещено).
Интерферометр Жамена (интерференционный рефрактометр) — интерферометр для измерения показателей преломления газов и жидкостей, а также для определения концентрации примесей в воздухе.
Интерферометр Жамена состоит из двух одинаковых толстых плоскопараллельных пластинок из стекла(или кварца), установленных почти параллельно друг другу. Пучок света падает на первую пластинку под углом i, близким к 45°. Каждый луч пучка после отражения на поверхностях пластинки делится на 2 когерентных луча S1 и S2, идущих на некотором расстоянии друг от друга, зависящем от толщины пластинок d. Далее на второй пластинке каждый из них аналогичным образом разделяется на два луча. В результате от второй пластинки идут 4 параллельных когерентных луча S1’, S1”, S2’, S2”; Средние пучки S1” И S2’ налагаются и образуют интерференционную картину в фокальной плоскости объектива О1.
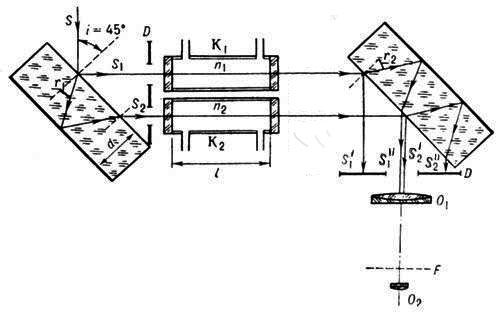
Рисунок 145. Схема интерферометра Жамена: ОО – ось вращения компенсаторных пластинок; L – лимб поворота компенсатора; О1 и О2 – объектив и окуляр зрительной трубы.
Разность хода между ними равна
 ,
,
где nп — показатель преломления пластинок.
φ — угол междуними.
При (φ ≈ 5′ - 15′ ∆ мала, поэтому при использовании источника белого света наблюдаются только интерференционные полосы низкою порядка, которые имеют форму прямых линий с белой ахроматической полосой в центре, окружённой системой окрашенных полос.).
Сравнительно большое расстояние между лучами S1 и S2, позволяет установить на их пути две кюветы К1 и К2 одинаковой длины l с исследуемыми веществами, показатели преломления которых n1 и п2. Возникающая разность хода, что вызовет смещение интерференционной картины.
∆ = (n2—n1)l = δnl
С помощью Интерферометра Жамена проводят количественный анализ газовых смесей — определяют концентрацию некоторых газообразных примесей, например метана и СО2, в воздухе шахт (т. к. n зависит от природы газа).
Интерферометр Физо- один из простейших интерферометров применяемый главным образом для контроля точности изготовления плоских поверхностей оптич. деталей.
Свет от монохроматического источника L с помощью конденсора O1 диафрагмы D и объектива О2 направляется параллельным пучком на эталонную Э и контролируемую К пластинки (положенные одна на другую) почти перпендикулярно к их поверхностям. При этом строго плоская эталонная и контролируемая поверхности пластинок образуют между собой небольшой угол a. С помощью полупрозрачной пластинки П в отражённом свете наблюдаются интерференционные полосы равной толщины,которыерые локализованы в области воздушного клина между контролируемой и эталонной поверхностями.
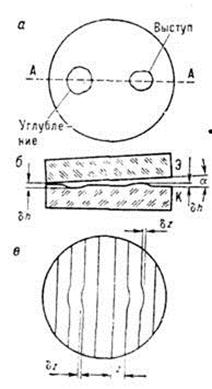
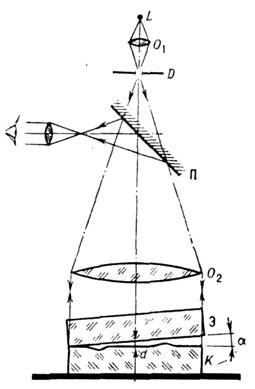
Рисунок 146. Интерферометр Физо; а - Вид дефектов сверху на контролируемой пластинке; б - Сечение эталонной и контрольной пластинок. Сечение по линии А-А (угол a и размеры дефектов для наглядности сильно увеличены); в - Вид интерференционной картины полос равной толщины в интерферометре Физо.
Положения этих полос определяются из условия: D=2dn+l/2=ml=const (при п~1), где d - толщина воздушного клина. Если контролируемая поверхность идеально плоская, то полосы равного наклона имеют форму прямых эквидистантных линий, параллельных ребру клина (d=const), расстояние между к-рыми равно z=l/2a (рис. 2, в) (при a=10'' и l~0,5 мкм, z=5 мм). Если же на контролируемой поверхности имеются к--л. дефекты, например, небольшие углубления или выступы, как на рисунке или она не строго плоская, то в области расположения этих дефектов наблюдаются отклонения dz от прямолинейности. При этом относит, величина отклонения dz/z связана с высотой или глубиной дефекта dh соотношением dh=(l/2)dz/z.
Невооружённый глаз может оценить величину dz/z~0,l, что соответствует величине обнаруженного дефекта dh=l/20 (при l=0,633 мкм, dh=0,031 мкм). Знак отклонения позволяет отличить тип дефекта: углубление или выступ. Если контролируемая поверхность имеет форму сферы, то интерференционные полосы имеют форму концентрических окружностей (см. Ньютона кольца). В интерферометре Физо поверхности контролируемой и эталонной пластинок из-за малости угла (угл. секунды) почти полностью соприкасаются друг с другом и в процессе юстировки могут быть повреждены. Поэтому для контроля поверхностей часто используются бесконтактные интерферометры, построенные по схеме интерферометра Майкельсона.

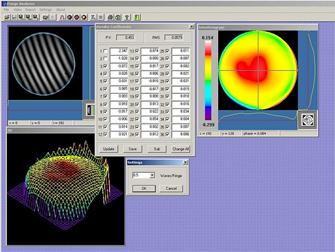
Рисунок 147. Интерферометр Физо конструкции Романова предназначен для бесконтактного измерения формы плоских полированных поверхностей и зеркал. Программное обеспечение предназначено для обработки интерференционных картин с дополнительно введёнными наклонами.
Литература.
- Д. Н. Черкасова, А. В. Бахолдин / «Оптические офтальмологические приборы и системы Часть I»/ Санкт-Петербург 2010.
- Лукин С.Б. / «КОНСПЕКТ ЛЕКЦИЙ ПО КУРСУ ОЭС» / СПбГУ ИТМО 2004г.
- Латыев С.М./ «Конструирование точных (оптических) приборов»/ Электронный учебник по дисциплине: "Основы конструирования оптических приборов". СПбГУ ИТМО
- А.Л. Андреев / «Автоматизированные телевизионные системы наблюдения» / СПбГУ ИТМО
- Митрофанов С.С / «Теоретические и физические основы устройства ОП»/ Электронный учебник по дисциплине: "Прикладная оптика". СПбГУ ИТМО, кафедра КиПОП
- https://biggest.su/samyj-bolshoj-teleskop/
7. В. Самохин, Н. Терехова/ «Видеопроекция сегодня и завтра»
8. М.А. Кустикова, М.Н. Мешалкина, В.Л. Мусяков, А.Н. Тимофеев/ «Методические указания к лабораторным работам по разделу «ОПТИКО-ЭЛЕКТРОННЫЕ ГАЗОАНАЛИЗАТОРЫ» курса «ЭКОЛОГИЧЕСКИЙ МОНИТОРИНГ»
9..Майкельсон А.А. Исследования по оптике. М. – Л., 1928
10. https://www.krugosvet.ru/enc/nauka_i_tehnika/fizika/OPTIKA.html?page=4,6
11..Захарьевский А.Н. «Интерферометры» 1952.
12. М.М. Мирошников / «Теоретические основы ОЭП»/ «Машиностроение «1977г.
13. М.М. Русинов / «Габаритные расчёты оптических систем» Москва 1963
14. Г.Г. Ишанин, М. Г. Козлов, К.А. Томский / «Основы светотехники»/ СПб 2004г

