 2014-02-24
2014-02-24 665
665Замечание
Если при настройке ПИ-регулятора установить очень большую величину постоянной времени интегрирования  , то его действие будет аналогично действию П-регулятора, если установить очень малые значения
, то его действие будет аналогично действию П-регулятора, если установить очень малые значения — действию И-регулятора.
— действию И-регулятора.
Качество регулирования в ряде случаев можно повысить, вводя в закон регулирования составляющую, пропорциональную первой производной (скорости изменения) входной величины регулятора, т. е. Д-составляющую.
ПД-закон регулирования определяется функциональной зависимостью

Постоянную называют временем предварения
называют временем предварения
Поскольку для ПД-регулятора, как и для П-регулятора, ему присущ недостаток — статическая погрешность .
.
Структурную схему ПД-регулятора можно представить в виде параллельного соединения статического звена нулевого порядка и идеального дифференцирующего (рис. 57), формирующих две составляющих управляющего воздействия: П-составляющую и Д-со-ставляющую.
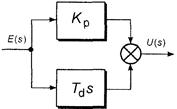
Рис. 57. Структурная схема ПД-регулятора








