 2014-02-09
2014-02-09 1731
1731В биологии и физиологии используется понятие о синергизме как о совместном и однородном функционировании органов живой системы; говорят, например, о двигательном синергизме как об одновременном действии многих мышц, обеспечивающем сложное целенаправленное движение, в котором участвует несколько суставов. Высокие синергетические возможности живых систем связаны с избыточностью кинематических возможностей их двигательной системы.
Применительно к манипулятору, также можно говорить о свойстве избыточности кинематических возможностей. При отсутствии избыточности уровень экономности двигательного синергизма однозначно определяется структурой и размерами манипуляционной системы и заданным законом движения; возможность выбирать законы управления исключается. При этом задача управления движением состоит только в том, чтобы обеспечить изменения обобщенных координат в соответствии с заданным движением, однозначно определяющим всю программу управления. Двигательная избыточность вносит неопределенность в задачу распределения заданного движения захвата манипуляционной системы между отдельными ее звеньями, позволяет решать ее множеством способов.
Введем понятие объем движения, которое характеризуется величиной полного перемещения (углового или линейного), совершающегося в некоторой кинематической паре. Сумма объемов движений во всех кинематических парах будем называть объемом движения манипуляционной системы при выполнении ею заданного перемещения. Затраченный объем движения по существу характеризует полный пробег машины в процессе работы. Оказывается, один и тот же объем работы при разных способах управления сопряжен с различным пробегом. Неэкономные управления приводят к повышенным пробегам со всеми вытекающими отсюда последствиями: повышается износ в подвижных сочленениях механизмов, быстрее увеличиваются люфты и зазоры и, как следствие этого, растут дополнительные динамические нагрузки на звенья манипулятора (см. рисунок). В результате снижается ее долговечность и точностные показатели работы. Кроме того, неэкономное управление ведет к увеличению работы сил трения и повышению энергетических затрат на единицу перемещения захвата. Таким образом, неэкономное управление оказывается неэкономным в прямом смысле этого слова, т.е. по энергетическому критерию.
Применительно к машинам и автоматам традиционного типа широко применяется термин наработка; ею измеряют время работы машины (обычно в часах). Наработка представляет один из важнейших факторов оценки долговечности. В отсутствие избыточности управление определяется однозначно; при этом величина наработки представляет собой по существу тот же объем движения, только представленный во временном выражении. При наличии двигательной избыточности одному и тому же времени наработки могут отвечать разные объемы движения в зависимости от выбранного управления, при этом затраченный объем движения становится независимым фактором оценки не только качества управления, но и долговечности робота.
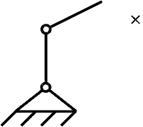 | 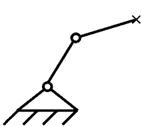 | 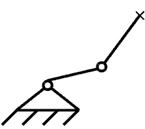 |
| а) | б) | в) |
| Пример реализации избыточности движений: а) исходное положение манипулятора; б) оптимальное управление; в) неоптимальное управление |








