 2014-02-09
2014-02-09 608
608Два зубчатых колеса с одинаковым модулем и с числами зубьев соответствующими заданному передаточному отношению образуют зубчатую передачу или простейший зубчатый механизм. В этом трехзвенном механизме зубчатые колеса образуют между собой высшую пару, а со стойкой низшие пары. Зубчатая передача, кроме параметров образующих ее колес, имеет и собственные параметры: угол зацепления a w, межосевое расстояние aw, воспринимаемое смещение y*m и уравнительное смещение D y*m. Передаточное отношение механизма u12, числа зубьев колес z1 и z2, начальные окружности rw1 и rw2 (или центроиды) и межосевое расстояние aw связаны между собой следующими соотношениями (см. основную теорему зацепления и раздел по кинематике зубчатой передачи):
aw = rw1 + rw2 ; u12 = rw2 /rw1 ; aw = rw1 * (1 + u12);
rw1 = aw / (1 + u12); rw2 = rw1 - aw .
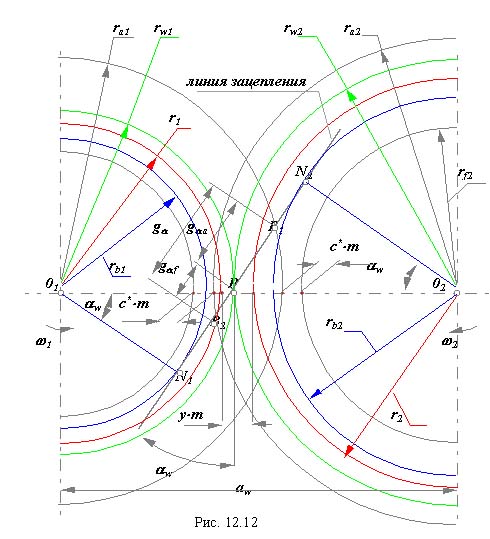
Изобразим схему зацепления эвольвентной зубчатой передачи (рис.12.12).
|
Основные уравнения эвольвентного зацепления.
1. Угол зацепления a w
Так как перекатывание начальных окружностей друг по другу происходит без скольжения, то
sw1 = ew2 и sw2 = ew1, но sw1 + ew1 = pw1 и sw2 + ew2 = pw2 ,
кроме того pw1= pw2= pw , тогда sw2 + sw1 = pw .
Толщину зуба по начальной окружности можно записать, используя формулу для толщины зуба по окружности произвольного радиуса
sw1 = m * (cos a / cos a w) * [(p / 2) + D 1 - (inv a w - inv a)* z1 ],
sw2 = m * (cos a / cos a w) * [(p / 2) + D 2 - (inv a w - inv a)* z2 ],
а шаг по начальной окружности равен
pw = p * m * (cos a / cos a w).
Поставляя эти выражения в формулу для шага по начальной окружности, получим
pw = sw2 + sw1 p * m * (cos a / cos a w ) = m * (cos a / cos a w) *[(p / 2) + D 2 - (inv a w - inv a)* z2 + (p / 2) + D 1 - (inv a w - inv a)* z1 ]
(D 1 + D 2) - (z1 + z2) * (inv a w - inv a) = 0,
inv a w = inv a + (D 1 + D 2 )/ (z1 + z2 ).
2. Межосевое расстояние aw
Из схемы эвольвентного зацепления (рис.12.12) можно записать
aw = rw1 + rw2 ,
но ry = r * (cos a / cos a y ) и rw = r * (cos a / cos a w ),
после подстановки, получим
aw = r1 * (cos a / cos a w ) + r2 * (cos a / cos a w ),
aw = (m*z1 /2 + m*z2 / 2)* (cos a / cos a w ),
aw = m* (z1 + z2)* (cos a / cos a w ) / 2.
3. Воспринимаемое смещение y* m
Из схемы эвольвентного зацепления (рис.12.12) можно записать
|
4. Уравнительное смещение D y* m
Из рис. 12.12 aw = ra1 + c** m + rf2,
aw = r1 + r2 + y* m,
откуда
ra1 + c** m + rf2 = r1 + r2 + y* m,
где ra1 = m * (z1 / 2 + h * a + x1 - D y), rf 2= m * (z2 /2 - h * a - c* + x2).
Подставим эти выражения

|
и, после преобразований, получим
x1 + x2 - D y = y,
D y = (x1 + x2 ) - y.








