 2015-01-30
2015-01-30 2070
2070Зависимость электромагнитного момента от скольжения.
Наибольшее значение для оценки свойств асинхронного двигателя имеет механическая характеристика, представляющая собой графическую зависимость частоты вращения ротора п 2от вращающего момента М, т. е. п 2 = f (M) или М = f (n 2). Иногда эта зависимость выражается в виде M = f (s) или М = f (v), где v = п 2/ п 1 - относительная частота вращения. При этом
(1)
s = (n1 - n2 )/n1 = 1 — v.
Использование понятий относительной частоты вращения и скольжения придает механической характеристике более общий характер. Для построения механической характеристики можно воспользоваться круговой диаграммой либо формулой
(2)
М = m1U12R'2 /ω1 s[(R1+ C1 R'2 /s)2 + (X1 + C1 X'2 )2],
получаемой из формулы
М = Δ Рэл2 /(ω1 s) = m1 I22R'2 /ω1 s
путем подстановки значения тока I '2 из схемы замещения:
I'2 - U1 /√(R1+ C1 R'2 /s)2 + (X1 + C1 X'2 )2
Для машин мощностью более 10 кВт величина С 1 ≈ 1 и формула момента приобретают более простой вид:
(2a)
М = m1 U12R'2 /ω1 s[(R1+ R'2 /s)2 + (X1 + X'2 )2].
Задаваясь значениями s, при известных параметрах двигателя можно определить М и построить искомую механическую характеристику.
Механическая характеристика (рис. 1, а и б) имеет максимум момента при частоте вращения n 2 ≈ (0,8 ÷ 0,9) n 1; при частоте вращения n 2 = n 1 момент вращения М = 0, а при n 2 = 0 пусковой момент составляет М п = (0,3 ÷ 0,7) M max.
Скольжение, при котором момент имеет максимальное значение (критическое скольжение), можно определить из (2), взяв производную от момента по скольжению dM/ds и приравняв ее нулю.
Решая уравнение относительно s, получаем критическое скольжение:
(3)
sкр = ± C1 R'2 /√R12 + (X1 + C1 X'2)2.
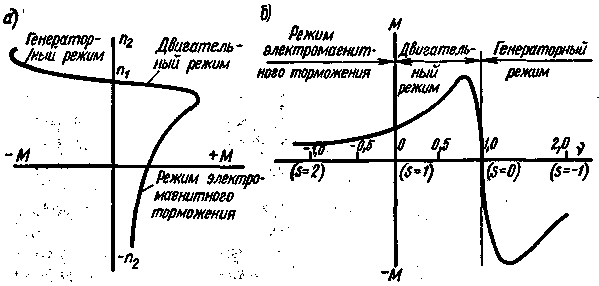 |
| Рис. 1. Механическая характеристика асинхронной машины |
В первом приближении, принимая C 1 = 1,0 и пренебрегая величиной R 1 в знаменателе [так как R 1 < (X 1 + X '2)], имеем
(3a)
sкр = ± R'2 /(X1 + X'2 ).
Для получения высокого КПД необходимо снижать величину R 2, вследствие чего максимум момента асинхронного двигателя достигается при относительно высоких частотах вращения. Значение максимального момента получим из (4.46), подставив значение sкр из (3):
(4)
Мmax = ± mU12/{2ω1 C1 [± R1 + √R12 + (X1 + C1 X'2)2]},
или, приближенно считая С 1 = 1и R 1 = 0,
(4a)
Мmax ≈ ± m1 U12/[2ω1 /(X1 + X'2)].
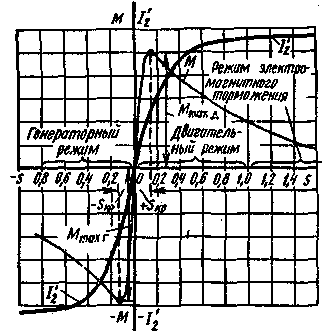 |
| Рис. 2. Зависимость электромагнитного момента и тока ротора от скольжения |
Знак «+» относится к двигательному режиму, «-» - к генераторному.
Из уравнения (4) и круговой диаграммы видно, что максимальный момент не зависит от активного сопротивления ротора. Это сопротивление определяет лишь скольжение при максимальном моменте.
При увеличении скольжения от s = 0 до 1, как следует из круговой диаграммы, ток ротора I '2 монотонно возрастает, в то время как электромагнитный момент М сначала увеличивается с ростом скольжения, достигает максимума при s = s кр, а затем уменьшается, несмотря на возрастание тока I '2 (рис. 2).
Физически это объясняется тем, что в формуле момента М = смФтI2 х cos ψ2 при малых сколь жениях преобладающее влияние имеет возрастание тока I 2. При увеличении скольжения свыше s кр ток I 2возрастает сравнительно мало и преобладающее влияние оказывает уменьшение cos ψ2, которое происходит вследствие повышения частоты в роторе: f2 = sf1 .
Построение механической характеристики по каталожным данным. На практике широко используют приближенное аналитическое выражение механической характеристики. Электромагнитный момент асинхронного двигателя
(5)
М = Δ Рэл2 /(ω1 s) = m2 I22R2 /(ω1 s) =m2 sE22R2 /[ω1 (R22 + s2X22)].
Принимая приближенно E 2 ≈ const, т. е. считая, что магнитный поток машины при изменении нагрузки не изменяется, и приравнивая нулю производную dM/ds, полученную из формулы (5), можно найти критическое скольжение, соответствующее максимальному моменту, sкр = ±R2 /X2 и соответственно максимальный момент
(6)
Мmax = ± т2 E22/(2ω1 X2).
Разделив выражение (5) на (6), после преобразования получим
(7)
M/Мmax = 2/(sкр /s + s/sкр).
Формула (7) является приближенной и, конечно, дает погрешность, так как не учитывает падение напряжения в обмотках статора. Особенно велика погрешность при переходе из двигательного режима в генераторный, где разница в моментах может быть существенной. Однако для исследования одного режима выведенная формула дает приемлемую точность. Это объясняется тем, что в области малых скольжений от s = 0 до s кр магнитный поток изменяется незначительно и, следовательно, в этой области формула не может дать большой погрешности, тем более, что точки при s = 0 и s кр являются фиксированными.
При скольжениях, близких к единице, формула (7), казалось бы, должна давать завышенные значения момента, гак как при больших токах сильнее проявляется падение напряжения в статоре. Однако в реальных машинах при скольжениях, близких к единице, уменьшается сопротивление Х 2 из-за явления вытеснения тока в проводниках ротора, что ведет к увеличению момента. В результате оказывается, что погрешность, обусловленная пренебрежением падения напряжения в статоре, и погрешность, вызванная изменением параметров ротора, взаимно противоположны, вследствие чего точность приближенной формулы (7) достаточна для практических целей.

