2015-01-30
2015-01-30 824
824Эффективность И-регулятора растет с течением времени. Даже небольшое отклонение системы приводит к подачи высокого выходного сигнала, если оно существует в течение достаточно продолжительного периода времени. Этот регулятор преобразует скачки входного сигнала в выходные сигналы пологого типа при помощи постоянного интегрирования.
Это значит, что изменение регулирующих переменных происходят непрерывно и достаточно медленно по сравнению с регулятором пропорционального действия.
Если на вход регулятора интегрального действия поступает постоянный сигнал, то изменение выходного значения происходит непрерывно до тех пор, пока отклонение системы не будет компенсировано. Регулирующая переменная регулятора интегрального действия пропорциональна площади на графике зависимости отклонения системы от времени.
Чем больше отклонение системы и отклонение системы с течением времени, тем круче рост регулирующей переменной. В случае с И-регулятором отклонение системы и скорость преобразования регулирующей переменной являются пропорциональными, т.е. чем больше отклонение системы, тем быстрее изменяется исполнительный элемент.
Регуляторы интегрального действия в чистом виде применяются редко, так как они имеют склонность к нестабильности и слишком медленно реагируют на быстрые изменения.
Область применения
И-регуляторы часто применяются для устранения недостатков пропорционального регулятора – его неспособность полностью компенсировать отклонение системы. Именно поэтому на практике они часто применяются вместе с пропорциональными регуляторами.
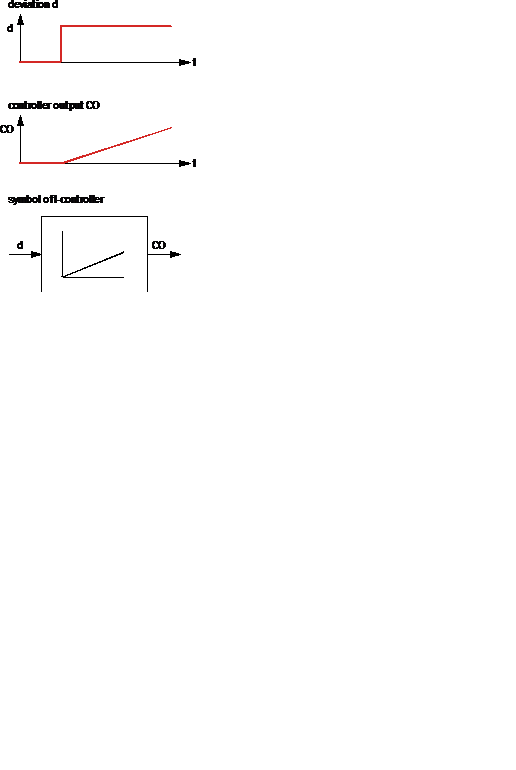
| Deviaton d | Отклонение d |
| Controller output CO | Выход регулятора СО |
| Symbol of P-controller | Символ П-регулятора |
Временная реакция И-регулятора: для И-регулятора реакция регулирующей переменной пропорциональна площади на графике отклонения системы и времени.