 2015-01-30
2015-01-30 5592
5592В ПИ-регуляторе комбинируется поведение И-регулятора и П-регулятора, благодаря чему используются преимущества обоих типов регуляторов: быстрый отклик регулятора интегрального действия и компенсация остаточного отклонения системы регулятора пропорционального действия. Поэтому ПИ-регулятор можно применять в большом количестве управляемых систем.
В дополнение к пропорциональному усилению ПИ-регулятор обладает дополнительной характеристикой, которая показывает поведение И-составляющей: время интегрального воздействия, что позволяет измерять то, насколько быстро регулятор выполняет сброс регулирующей переменной в дополнение к генерированной П-воздействием регулирующей переменной для компенсации остаточного отклонения системы. Время сброса – это отрезок времени, на который ПИ-регулятор срабатывает быстрее регулятора интегрального действия.
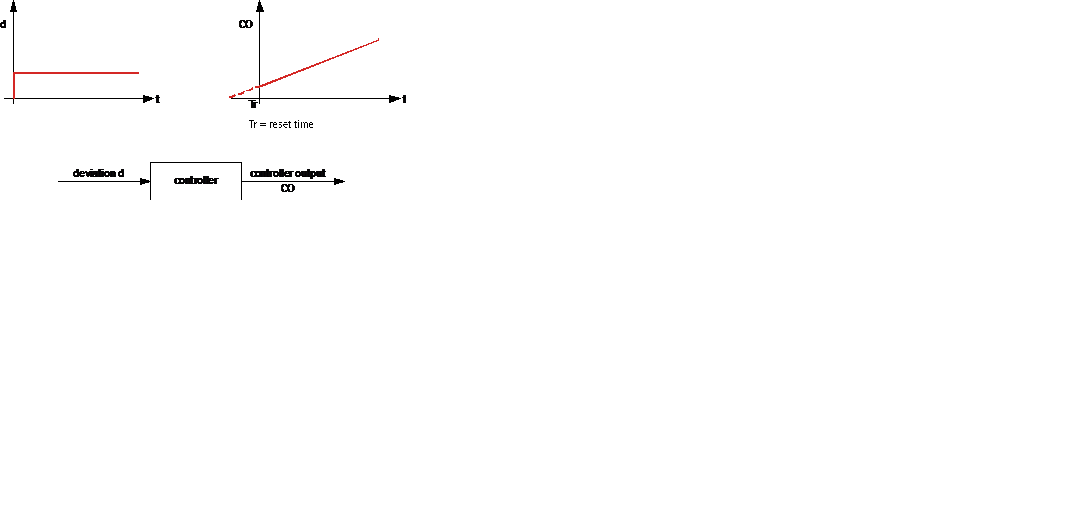
| deviation d | Отклонение d |
| controller | Регулятор |
| controller output | Выход регулятора |
ПИД-регулятор
В дополнение к упомянутым свойствам ПИ-регулятора ПИД-регулятор также включает в себя компоненту коррекции по производной. Им учитывается быстрота изменения отклонения системы.
Если отклонение системы большое, то Д-компонента гарантирует мгновенное и очень сильное изменение регулирующей переменной. В то время как влияние Д-компоненты снижается мгновенно, рост И-компоненты происходит медленно. Если отклонение системы небольшое, то поведением Д-компоненты можно пренебречь.
· Преимущество
Преимущество такого поведения заключается в более высокой скорости реакции на изменения или переменные возмущения, и, следовательно, в более быстрой компенсации отклонений системы.
· Недостаток
Недостаток заключается в том, что контур регулирования намного более подвержен колебаниям, и, следовательно, намного сложнее произвести правильную настройку регулятора
Время коррекции по производной
Из-за Д-воздействия этот тип регулятора имеет более высокую скорость по сравнению с П- или ПИ-регулятором. Это проявляется во времени коррекции по производной Tv. Время коррекции по производной – это отрезок времени, на который ПИД-регулятор срабатывает быстрее ПИ-регулятора.
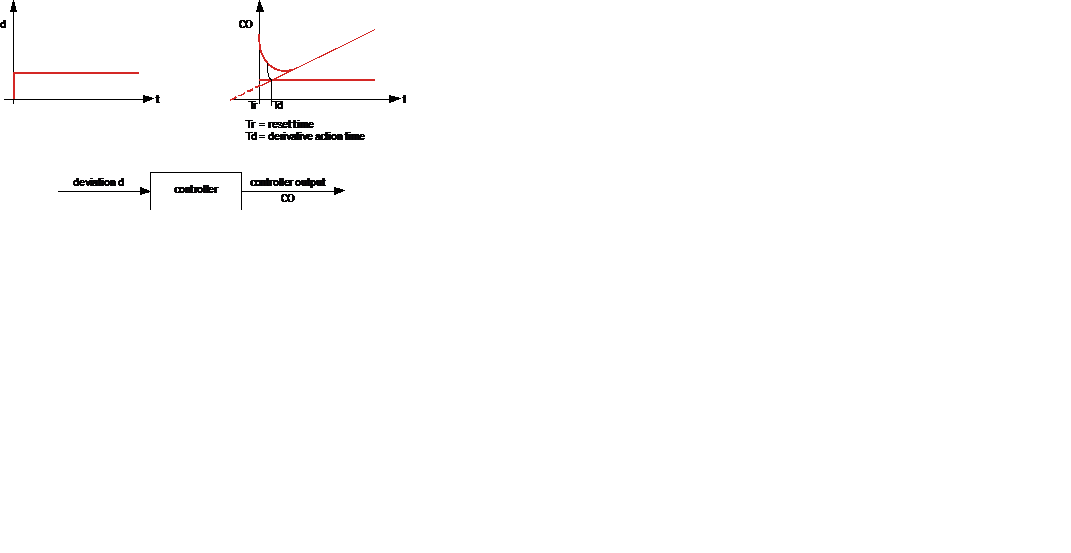
| deviation d | Отклонение d |
| controller | Регулятор |
| controller output | Выход регулятора |
| reset time | Время сброса |
| Derivative action time | Время коррекции по производной |
| Обзор Тип регулятора | Временная реакция | Характеристики |
 отклонение отклонение | ||
| П-регулятор |  | Для минимальных требований к опорной переменной. Высокая скорость реакции, но не может полностью компенсировать отклонение системы. |
| И-регулятор | 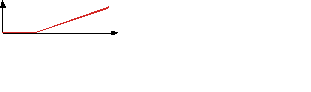 | Низкая скорость реакции; отклонение системы может полностью компенсироваться. При сильном изменении переменной возмущения интегральное воздействие имеет склонность к возникновению колебаний. |
| Д-регулятор | 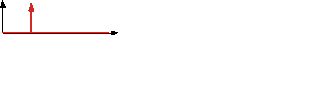 | Реагирует только на изменения в отклонении системы. Сам по себе не применяется. |
| ПИ-регулятор | 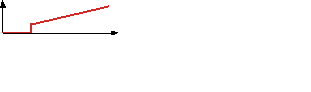 | В регуляторы пропорционального действия часто встраивается небольшая компонента интегрального действия, которая позволяет полностью компенсировать отклонение системы. Такая комбинация применяется часто. |
| ПД-регулятор | 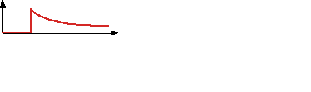 | Эта комбинация применяется редко. Она подходит для регулирования с обратной связью, когда необходима быстрая реакция на сильное изменение переменной возмущения. |
| ПИД-регулятор |  | Применяется для обеспечения высоких требований систем управления с обратной связью. П-компонента обеспечивает быстрое управление с обратной связью, И-компонента обеспечивает высокую точность,а Д-компонента повышает скорость управления с обратной связью. |








