 2015-01-30
2015-01-30 1032
1032Управление с обратной связью является составной частью автоматизированных систем, функция которых состоит в стабилизации процесса. Они применяются для:
· вызова и автоматического поддержания определенных состояний процессов (режимов эксплуатации),
· устранения возмущений в технологических последовательностях,
· предотвращения образования нежелательных связей среди подпроцессов внутри технического процесса
Параметрирование посредством подбора
Такой способ определения размеров отдельных компонент является наиболее подходящим, так как нами рассматривается простая система. В нашем случае компонента Kd не оказывает влияния на поведение Robotino’s® при управлении. Следовательно, необходимо выполнить только грубую настройку компонент Kp и Ki. Это достигается при помощи выбора наименьшей компоненты Kp и настройки компоненты Ki на ноль (Kp = малое значение, Ki=0).
Теперь компонента Kp (усиление) медленно повышается до момента достижения слабого затухания.
Пример - Robotino® View
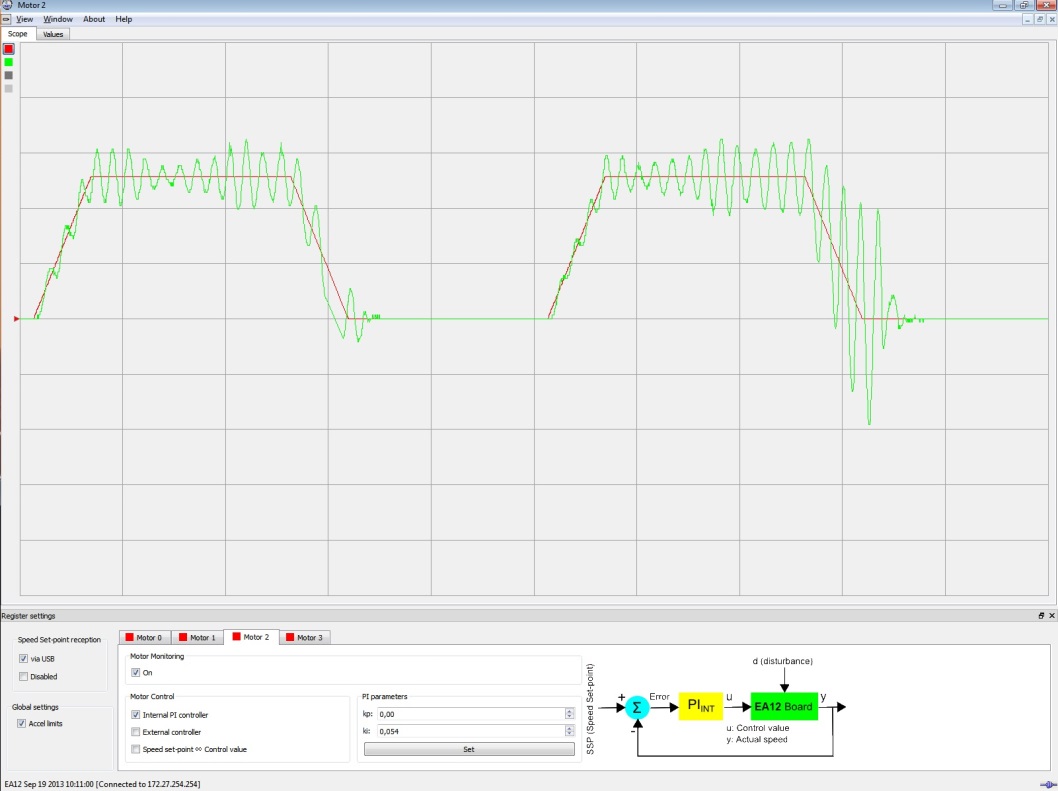
Настройка ПИД-регулятора
В Robotino® View (посредством EA09 View) легко реализуется регулировка скорости двигателя постоянного тока. Задавать параметры компонент kp, ki можно при помощи бегунков.
Слабое затухание
Слабое затухание наблюдается при уменьшении колебаний è Смещение колебания.
Тем не менее, если вероятность возникновения колебания высока, то компоненту Kp необходимо регулировать немного медленнее. Затем добавляется И-компонента, происходит ее ступенчатое увеличение и проверка до тех пор, пока результат не будет практически совпадать. Если результат по-прежнему неудовлетворителен, также можно добавить Д-компоненту. Эта компонента позволяет повысить стабильность регулирования с обратной связью. В таком случае компоненты Kp и Ki можно увеличить еще раз. Действие повторяется до тех пор, пока не будет получен абсолютно удовлетворительный результат.
Этот очень практичный и распространенный метод определения параметров регулятора не всегда обеспечивает оптимальный результат; однако в рамках данной системы результат является приемлемым.
Иные методы настройки параметров регуляторов – это задание параметров по:
· Правилам настройки
· Методу колебаний
· Переходной характеристике
· Диаграмме Боде








