 2015-01-07
2015-01-07 2917
2917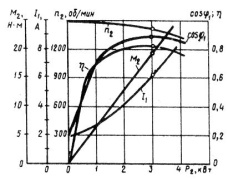 Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs j и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs j и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.
Рабочие характеристики асинхронного двигателя двигателя
При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя n2=n1 или S=0. При номинальной нагрузке скольжение обычно составляет S = 3-5%. Скорость вращения ротора

Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно и не превышает 5%. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.

Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М0, т. е.
где Р2 — полезная мощность двигателя, W2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М0; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs j мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsj мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsj возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соsj, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
 Кривая к. п. д. т имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки. Торможение противовключением Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
Кривая к. п. д. т имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки. Торможение противовключением Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
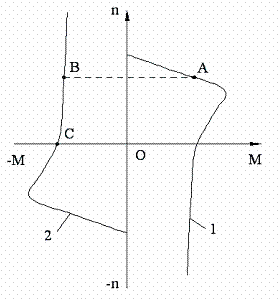
На рис. 2.27 представлены механические характеристики асинхронного двигателя при торможении противовключении для прямого (1) и обратного (2) порядка чередования фаз.
Пусть двигатель с нагрузкой на валу работал в точке А. Для торможения двигателя нужно изменить порядок чередования фаз, т.е. переключить две фазы. При этом рабочая точка перейдет в точку В (рис. 2.27). На участке ВС машина работает в режиме электромагнитного тормоза, развивая тормозной момент, под действием которого происходит быстрое снижение скорости до нуля. В точке С двигатель нужно отключить от сети, иначе произойдет реверс.
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
 Билет 13
Билет 13
1. В общем случае при несимметричной нагрузке Zab ≠ Zbc ≠ Zca. Обычно она возникает при питании от трехфазной сети однофазных приемников.
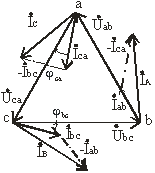
Векторная диаграмма для случая, когда в фазе ab имеется активная нагрузка, в фазе bc – активно-индуктивная, а в фазе ca – активно-емкостная приведена на рис. 3.16, топографическая диаграмма – на рис. 3.17.
Построение векторов линейных токов произведено в соответствии с выражениями
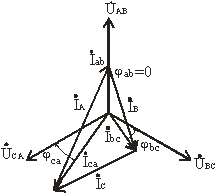 İA = İab - İca; İB = İbc - İab; İC = İca - İbc.
İA = İab - İca; İB = İbc - İab; İC = İca - İbc.
Таким образом, при несимметричной нагрузке симметрия фазных токов İab, İbс, İca нарушается, поэтому линейные токи İA, İB, İC можно определить только расчетом по вышеприведенным уравнениям (3.20) или найти графическим путем из векторных диаграмм (рис. 3.16, 3.17).
Сумма мгновенных значений токов равна нулю – доказывается с помощью временных диаграмм трехфазной системы токов (см. рис.)
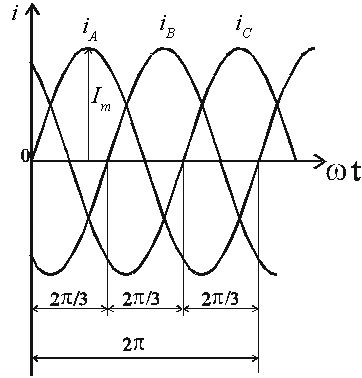 | В момент времени ω t = 0: iA = 0, iC > 0, iB < 0, причем iC = – iB в момент ω t = 2π/12 iB = – Im, iA = iC = 0,5 Im в момент ω t = 2π/6 iC = 0, iA = – iB и т.д. Во всех случаях сумма мгновенных значенийтоков равна нулю. |
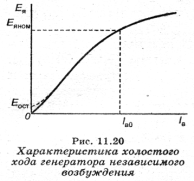
2. Характеристика холостого хода — это зависимость ЭДС якоря Ея от тока возбуждения IВ, когда нагрузка отсутствует, а частота вращения якоря п постоянна:
Ея = f(IB) при I = 0, п = const,
где I — ток нагрузки (у генератора независимого возбуждения ток нагрузки равен току якоря).
 В режиме холостого хода Ея = сепФ0, так как результирующий поток Ф равен основному потоку Ф0. Учитывая, что п = const, получим Ея = с'еФ,
В режиме холостого хода Ея = сепФ0, так как результирующий поток Ф равен основному потоку Ф0. Учитывая, что п = const, получим Ея = с'еФ,
где с'е = сеп = const. (cе – постоянная, зависит от машины, n – число витков)
Таким образом, ЭДС якоря линейно зависит от магнитного потока Ф0, который создается током возбуждения Iв. Зависимость между потоком и током возбуждения определяется характеристикой намагничивания. Следовательно, и зависимость Ея = f(IB) также имеет вид характеристики намагничивания (рис.). Если полюсы генератора предварительно намагничены, то они сохраняют остаточную намагниченность, поэтому в машине при токе Iв = 0 имеется незначительный магнитный поток Фост, называемый остаточным магнитным потоком. По этой причине при токе Iв = 0 в обмотке вращающегося якоря индуцируется небольшая остаточная ЭДС Еост, что несколько изменяет вид характеристики в начале координат (штриховая линия на рис.). Номинальному значению ЭДС Еяном = Uном соответствует ток возбуждения Iв0.
По ХХХ определяют, как нужно изменять ток возбуждения чтобы получить необходимую ЭДС.
3. Устройство синхронных машин
На статоре 1 генератора размещается обмотка 2, состоящая из трех частей или, как их принято называть, фаз. Обмотки фаз располагаются на статоре таким образом, чтобы их магнитные оси были сдвинуты в пространстве относительно друг друга на угол 2π/3, т.е. на 120°. На рис. 3.1 каждая фаза обмотки статора условно показана состоящей из одного витка. Начала фаз обозначены буквами A, B и C, а концы – X, Y, Z. Ротор 3 представляет собой электромагнит, возбуждаемый постоянным током обмотки возбуждения 4, расположенной на роторе.
 Статор синхронных машин имеет такое же устройство, как и статор асинхронной машины. Трехфазную обмотку, размещенную в пазах сердечника статора, выполняют с таким же числом полюсов, как и ротор. В синхронных машинах обмотку статора принято называть обмоткой якоря, а сердечник статора вместе с обмоткой — якорем. Однако статор синхронных машин имеет и некоторые конструктивные особенности, обусловленные необходимостью его интенсивного охлаждения, так как в крупных синхронных машинах мощность потерь энергии, преобразующейся в тепловую, очень велика. В крупных машинах в системах охлаждения в качестве хладагентов используют водород, трансформаторное масло и дистиллирован ную воду. В машинах относительно небольшой мощности используют также и воздушное принудительное охлажд ение.
Статор синхронных машин имеет такое же устройство, как и статор асинхронной машины. Трехфазную обмотку, размещенную в пазах сердечника статора, выполняют с таким же числом полюсов, как и ротор. В синхронных машинах обмотку статора принято называть обмоткой якоря, а сердечник статора вместе с обмоткой — якорем. Однако статор синхронных машин имеет и некоторые конструктивные особенности, обусловленные необходимостью его интенсивного охлаждения, так как в крупных синхронных машинах мощность потерь энергии, преобразующейся в тепловую, очень велика. В крупных машинах в системах охлаждения в качестве хладагентов используют водород, трансформаторное масло и дистиллирован ную воду. В машинах относительно небольшой мощности используют также и воздушное принудительное охлажд ение.
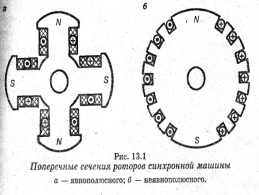
Ротор синхронных машин конструктивно выполняют либо явнополюсным (с явно выраженными полюсами), либо неявнополюсным (с неявно выраженными полюсами), поперечные сечения которых показаны на рис. 13.1. На роторе располагают обмотку возбуждения. Ее подключают к источнику постоянного напряжения, называемого возбудителем. Таким образом, ротор синхронной машины имеет свой магнитный поток, который определяет полярность его полюсов. В этом заключается принципиальное конструктивное отличие ротора синхрон ной машины от ротора асинхронной машины, поляр ность полюсов которого всегда определяется полярностью полюсов статора.
Неявнополюсный ротор, как правило, изготовляют как единое целое из стальной поковки, используя для этого особо прочную сталь, обладающую высокими магн итными и механическими свойствами. Обмотку возбуждения закладывают в пазы, выфрезерованные на наруж ной поверхности ротора, и она создает магнитное поле с двумя или четырьмя полюсами, если ее подключить к источнику постоянного напряжения. Такой ротор применяют в синхронных машинах при частотах вращения вала 3000 об/мин и 1500 об/мин (в турбогенераторах и синхронных двигателях). Общий вид неявнополюсного ротора турбогенератора показан на рис. 13.2а.
Явнсполюсный ротор применяют в гидрогенераторах, синхронных двигателях и компенсаторах, в которых частота вращения, как правило, не превышает 1000 об/мин. Внешний вид роторов таких машин показан на рис. 13.2б, в. Сердечники полюсов изготовляют из листовой электротехнической стали. Число полюсов, которых размещают обмотку возбуждения, может быть достаточно большим, особенно в гидрогенераторах. Это связано с тем, что гидравлические турбины — тихоходные машины, и чтобы получить промышленную часто ту напряжения f = рп/60 = 50 Гц при малой частоте вращения п, необходимо иметь большое число пар полюсов р. Так, например, гидрогенераторы, установленные на Саяно-Шушенской ГЭС, имеют частоту вращения п = 142,8 об/мин и число пар полюсов р = 21. По этой причине наружный диаметр ротора мощных гидрогенераторов может достигать 16 м при длине 1,75 м. С целью снижения механической нагрузки на вал в мощных гидрогенераторах вал ротора располагают вертикально. Внешний вид гидрогенератора с таким конструктивным исполнением показан на рис. 13.3.
Синхронные двигатели изготовляют, как правило, с горизонтальным расположением вала. При частоте вращения 3000 об/мин они имеют ротор с неявно выраженными полюсами, а при частоте вращения от 100 до 1000 об/мин — с явно выраженными полюсами. В машинах небольшой мощности такое исполнение ротора иногда применяют и при частотах вращения 1500 об/мин. В явнополюсных двигателях в полюсные наконечники укладывают короткозамкнутую обмотку, называемую пусковой, аналогичную короткозамкнутой обмотке ротора в асинхронных машинах (рис. 13.4). Она предназначена для осуществления асинхронного пуска синхронных двигателей и повышения устойчивости работы двигателя.
Синхронные компенсаторы выполняют только в явнополюсном исполнении с горизонтальным расположением вала.

