 2015-01-07
2015-01-07 3669
3669Двухклеточные двигатели имеют на роторе две короткозамкнутые беличьи клетки, одна из которых представляет собой так называемую пусковую обмотку, а вторая — рабочую. Рабочая обмотка выполняется из медных стержней и размещается в нижних частях пазов, а пусковая обмотка изготовляется из латунных или бронзовых стержней и располагается в верхних частях пазов, ближе к воздушному зазору. Сечение стержней пусковой обмотки может быть несколько меньше, чем у рабочей обмотки. Однако сечение и теплоемкость стержней пусковой обмотки должны быть достаточно велики, чтобы предотвратить чрезмерный нагрев этой обмотки при пуске. Иногда рабочую и пусковую обмотки размещают в отдельных пазах (рис. 27-5, а справа). В связи со сказанным активное сопротивление пусковой обмотки rп обычно в 2—4 раза больше активного сопротивления rр рабочей обмотки. Наоборот, индуктивное сопротивление рассеяния пусковой обмотки хоп в несколько раз меньше, чем хоp рабочей обмотки, поскольку последняя утоплена глубоко в стали сердечника ротора.
Вращающееся магнитное поле двигателя индуктирует в обеих обмотках ротора одинаковые э. д. с.
При пуске вследствие большой частоты тока ротора индуктивное сопротивление рабочей обмотки относительно велико и значительно больше полного сопротивления пусковой обмотки. Поэтому при пуске нагружена током в основном только пусковая обмотка, и ввиду большой величины ее активного сопротивления двигатель развивает большой пусковой момент. При разбеге двигателя частота тока ротора уменьшается, и при нормальной скорости вращения (s = 0,02 ÷ 0,05) индуктивные сопротивления рассеяния обмоток ротора будут в 20—50 раз меньше, чем при пуске. Поэтому в рабочем режиме активные сопротивления обмоток ротора значительно больше индуктивных и полные сопротивления обмотки определяются величинами активных сопротивлений. Вследствие этого при работе двигателя полное сопротивление рабочей обмотки значительно меньше, чем полное сопротивление пусковой, и током нагружена главным образом рабочая обмотка. Ввиду малости активного сопротивления этой обмотки двигатель имеет хороший к. п. д.
Таким образом, в двухклеточном двигателе при пуске происходит вытеснение тока ротора по направлению к воздушному зазору.
В пусковой обмотке двухклеточного двигателя при тяжелых условиях пуска (большой маховой момент приводимого агрегата и пуск под нагрузкой) выделяется большое количество тепла, и эта обмотка при пуске соответственно удлиняется, в то время как рабочая обмотка при пуске остается холодной и не удлиняется. Поэтому во избежание нарушения сварных соединений стержней с торцовыми короткозамыкающими кольцами стержни пусковой и рабочей обмоток присоединяются к отдельным кольцам.
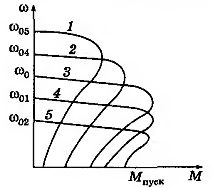
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения и др.). Поэтому данный способ регулирования используется
главным образом в случаях, когда для целых групп двигателей необходимо повышать (n > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме заменить явно-полюсный ротор на ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Величина напряжения регулируется, с помощью выпрямителя.
Если пренебречь относительно небольшим падением напряжения в первичной цепи асинхронного двигателя, то
U1=E1= 4,44 f 1 w 1 r об1Ф
 Существенное изменение величины потока Ф при регулировании n нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при том же значении М и т. д. Поэтому в большинстве случаев целесообразно поддерживать Ф = const. При этом следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
Существенное изменение величины потока Ф при регулировании n нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при том же значении М и т. д. Поэтому в большинстве случаев целесообразно поддерживать Ф = const. При этом следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
U1/f1=const.
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением n (например, приводы вентиляторов, когда Мст =n2), в этом случае более быстрое уменьшение по сравнению с f1 вызывает уменьшение Ф и улучшает энергетические показатели двигателя и в то же время уменьшение Мm с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
Ф=Е1/f1=const.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Закон частотного регулирования: 

