 2015-01-07
2015-01-07 1186
1186Нормальное и тангенсальное ускорение.
Вывод и определение.
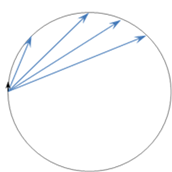
При криволинейном движении скорость направлена по касательной к траектории.
Поскольку направление скорости постоянно изменяется, то криволинейное движение - всегда движение с ускорением, в том числе, когда модуль скорости остается неизменным.
Составляющая ускорения, направленная вдоль скорости, называется тангенциальным ускорением. Она характеризует изменение скорости по модулю. вычисляется по формуле.


Это формула объясняется так:
- при движении по окружности, дуге или кривой мы можем взять отрезок настолько малый(при  стремящемся к нолю(
стремящемся к нолю( )), что можем пренебречь искривлением дуги и рассчитывать ускорение как ускорение по прямой (черный вектор).
)), что можем пренебречь искривлением дуги и рассчитывать ускорение как ускорение по прямой (черный вектор).
 Вторая составляющая полного ускорения – нормальное или центростремительное ускорение, которое вычисляется по формулам:
Вторая составляющая полного ускорения – нормальное или центростремительное ускорение, которое вычисляется по формулам:
 ;
; 
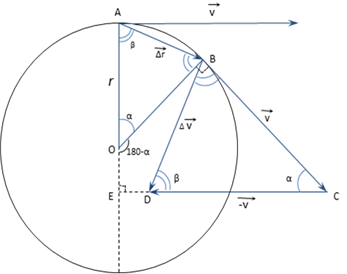
Центростремительное ускорение всегда направлено перпендикулярно направлению скорости. Вывести эти формулы достаточно легко. (Способ Пачин И.М. c лекции.)
Рассмотрим окружность, по которой движется некоторое тело со скоростью  из точки А. Через некоторый промежуток времени , точка изменит свое положение и окажется в точке B, скорость останется не изменой. Сделаем дополнительные построения: параллельно перенесем вектор начальной скорости в точку C но направим его в противоположную сторону (вектор – ). Построим вектор
из точки А. Через некоторый промежуток времени , точка изменит свое положение и окажется в точке B, скорость останется не изменой. Сделаем дополнительные построения: параллельно перенесем вектор начальной скорости в точку C но направим его в противоположную сторону (вектор – ). Построим вектор  и
и  . Тогда мы можем увидеть два подобных треугольника: ∆АВО и ∆BCD, доказать их подобие не сложно. Угол
. Тогда мы можем увидеть два подобных треугольника: ∆АВО и ∆BCD, доказать их подобие не сложно. Угол  АОВ представим как альфа (
АОВ представим как альфа ( ), тогда два оставшихся угла равны 90- α /2 (т.к. образуется равнобедренный треугольник со сторонами АО и АВ равные радиусу(r)) обозначим их как бета(
), тогда два оставшихся угла равны 90- α /2 (т.к. образуется равнобедренный треугольник со сторонами АО и АВ равные радиусу(r)) обозначим их как бета( ). Угол
). Угол  АОВ равен углу DСВ, поскольку рассматривая четырехугольник ОЕВС, сумма его противоположных углов ОВС и ОЕС равна 180, но угол ЕОС равен 180- α,
АОВ равен углу DСВ, поскольку рассматривая четырехугольник ОЕВС, сумма его противоположных углов ОВС и ОЕС равна 180, но угол ЕОС равен 180- α,  отсюда следует что угол DCB равен α. А поскольку вектора и
отсюда следует что угол DCB равен α. А поскольку вектора и  равны, следует, что треугольник равнобедренный, а значит два других его угла равны по , ч.т.д.
равны, следует, что треугольник равнобедренный, а значит два других его угла равны по , ч.т.д.
Тогда из подобия треугольников запишем отношение его сторон:


 разделим обе части на ∆t, получим
разделим обе части на ∆t, получим 
 , где - ускорение, а
, где - ускорение, а  – скорость получим следующее:
– скорость получим следующее: 
 выразив ускорение, получим
выразив ускорение, получим  . Ч.т.д.
. Ч.т.д.
Для нахождения полного ускорения представим их в векторном виде и посчитаем сумму векторов (составляющих)  и
и  , которая будет высчитываться по т. Пифагора:
, которая будет высчитываться по т. Пифагора: 








 |  |








