 2015-01-13
2015-01-13 1375
1375Как известно, для перемещения тела в пространстве и его произвольной ориентации механизм должен иметь не менее 6 степеней подвижности: 3 — для осуществления транспортных (переносных) движений и 3 — для ориентирующих движений. Сказанное иллюстрируется возможностями руки человека (рисунок 2, а), которая от предплечья до фаланг кисти имеет 22 степени подвижности, что обусловливает универсальные способности человека при выполнении им производственных функций. Однако, как следует из рисунок 2, а, вся совокупность перемещений кинематических звеньев руки человека сводится к транспортным (переносным) движениям х, у и z в декартовой системе координат, а также ориентирующим движениям αx, αy, αz относительно соответствующих координат. Поэтому эквивалентом руки человека может служить механизм (рисунок 2, б), способный выполнять ту же совокупность движений и являющийся промышленным роботом с шестью основными х, у, z, αx,αy, αz и одной дополнительной
(обеспечивает движение губок захватного устройств) степенями подвижности.
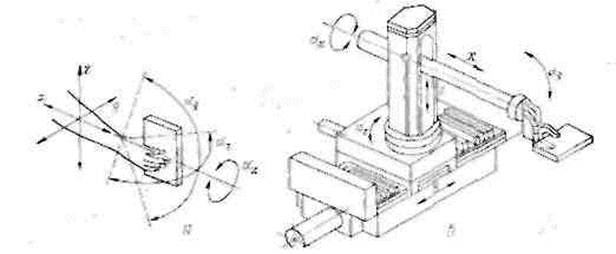
Рисунок 2 - Степени подвижности руки человека (а) н антропоморфного механизма (б)
Кинематическая структура ПР и их двигательные возможности определяются видом и последовательностью расположения кинематических нар. В свою очередь, характер движений рабочих органов ПР при выполнении вспомогательных и технологических операций и переходов диктуется производственными условиями. Различают глобальные, региональные и локальные движения.
Глобальные (межоперационные) движения — это перемещения ПР на расстояния, превышающие размеры самого робота, при обслуживании технологических объектов (линий). От возможности совершать глобальные движения зависит мобильность робота, и для их реализации робот снабжается подвижным основанием (в противном случае робот является стационарным).
Региональные движения — это перемещения рабочих органов ПР в пределах его зоны обслуживания. Конфигурация и размеры этой зоны определяются геометрическими параметрами звеньев руки робота. Таким образом, региональные движения относятся к внутри операционным.
К локальным движениям рабочих органов ПР принято относить перемещения на расстояния, не превышающие их размеров. Это главным образом ориентирующие движения кисти при выполнении технологических операций.
Как ориентирующие, так и транспортирующие движения должны выполняться с высокой точностью совокупного участия всех звеньев кинематической структуры ПР. Поэтому при создании роботов, копирующих физические функции руки человека, следует учитывать не только наличие звеньев, обеспечивающих совокупность движений, но также вид и последовательность их расположения в структуре.








