 2015-01-21
2015-01-21 4829
4829Пусть материальная точка движется с постоянной по модулю скоростью v по окружности радиуса R. При таком движении направление вектора скорости v постоянно изменяется (рис. 71), следовательно, как и при любом криволинейном движении, движение по окружности есть движение с ускорением.
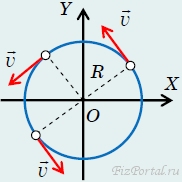
рис. 71
Рассмотрим изменение вектора скорости тела за малый промежуток времени Δt (рис. 72). Обозначим положение точки, движущейся по окружности радиуса R, в некоторый момент времени Аo.
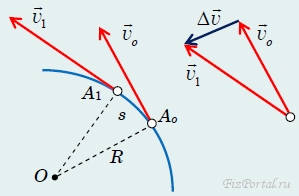
рис. 72
Вектор скорости vo в этот момент направлен по касательной к окружности, то есть перпендикулярно радиусу ОАo. За время Δt частица переместилась в точку A1, ее скорость v1 изменила направление и стала перпендикулярна радиусу ОА1 (но модуль ее остался неизменным: |vo| = |v1| = v). Для того чтобы вычислить изменение скорости, совместим начало векторов vo и v1. Тогда треугольник, образованный векторами скоростей, подобен треугольнику OAoA1. Из подобия этих треугольников следует
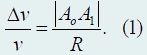
Если рассматривать изменение положения частицы и ее скорости за очень малый промежуток времени, то длина хорды |АoА1| будет очень близка к длине дуги АoА1
S = vΔt,
поэтому

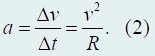
откуда получаем

Таким образом, модуль ускорения точки равен:
Чтобы полностью определить вектор ускорения, необходимо выяснить его направление. Заметим, что при малой величине Δt угол между векторами vo и v1 крайне мал, поэтому можно считать, что вектор изменения скорости направлен перпендикулярно1 как вектору vo, так и вектору v1. Следовательно, вектор ускорения в данном случае направлен к центру окружности.
Вектор ускорения точки при ее равномерном движении по окружности направлен к центру окружности, а его модуль равен v2/R. Такое ускорение называется центростремительным.
Как мы уже отмечали ранее, материальная точка, движущаяся по заданной линии, обладает одной степенью свободы, поэтому ее положение однозначно определяется одной координатой. В случае движения точки по окружности в качестве такой единственной координаты удобно выбрать угол поворота.
Пусть материальная точка движется по окружности радиуса R. Введем декартовую систему координат, начало которой совместим с центром окружности (рис. 74). Положение точки на окружности однозначно определяется углом φ между осью X и радиус-вектором точки.
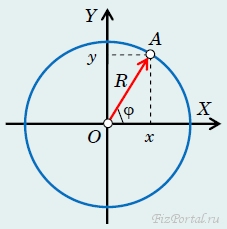
рис. 74
Конечно, оси координат можно направить произвольно, да и угол можно отсчитывать от оси Y, однако мы в дальнейшем для однозначности будем отсчитывать угол поворота от оси X в направлении против часовой стрелки.
Декартовые координаты точки однозначно выражаются через угол поворота по формулам
При движении точки ее координата, то есть угол поворота, изменяется, становится функцией времени. Поэтому закон движения в этом случае представляется функцией φ(t), то есть зависимости угла поворота от времени.
По аналогии с одномерным движением введем понятие угловой скорости.
Угловой скоростью ω называется отношение угла поворота к промежутку времени, в течение которого этот поворот произошел, при промежутке времени, стремящемся к нулю:
Единицей угловой скорости является рад/с − радиан в секунду, однако так как радиан является безразмерной величиной, размерность угловой скорости может быть просто 1/с = с−1 − секунда в минус первой степени.
При равномерном движении по окружности угловая скорость является постоянной и равна углу поворота в единицу времени. Время одного оборота (эту величину еще называют период вращения) Т легко найти, если вспомнить, что один оборот соответствует углу поворота 2π, поэтому
T = 2π/ω. (6)
Число оборотов в единицу времени называют частотой вращения, и она вычисляется по формуле
n = 1/T = ω/(2π). (7)
Установим связь между угловой и линейной скоростями при движении материальной точки по окружности. Модуль линейной скорости определяется как отношение пройденного пути к промежутку времени, за который этот путь пройден v = S/Δt, а при движении по окружности длина пути (длина дуги окружности) выражается через угол поворота (выраженный в радианах): s = RΔφ, поэтому
v = RΔφ/Δt = Rω. (8)
Запишем также выражение для центростремительного ускорения, используя понятие угловой скорости:
a = v2/R = (Rω)2/R = Rω2. (9)
Специально отметим, что формулы (8) и (9) остаются справедливыми при движении по окружности и в том случае, когда скорость точки изменяется по абсолютной величине. Так, при выводе формулы (8) можно рассмотреть случай Δt → 0. В таком пределе скорость v будет являться мгновенной скоростью, а ω − мгновенной угловой скоростью.
При вращении вокруг фиксированной оси направление вращения может иметь только два значения − по часовой стрелке и против часовой стрелки. Поэтому в этом случае можно говорить о двух знаках угловой скорости, обычно − плюс при вращении против часовой стрелки и минус − при вращении по часовой стрелке. Для того чтобы описать произвольное вращение, необходимо задать также ось вращения. Оказывается, удобно задавать ось вращения с помощью вектора, направленного вдоль этой оси. Если совместить эти две характеристики вращения, то получим вектор угловой скорости ω, направление которого совпадает с осью вращения, а модуль равен определенной нами угловой скорости. Используя математическую операцию векторного произведения, можно записать выражение для связи между линейной и угловой скоростями:

Аналогично можно определить вектор углового ускорения:

который определяет не только изменение скорости вращения, но и изменение оси вращения.

