 2015-02-24
2015-02-24 1234
1234Применение ТПЧ улучшает также другие качественные показатели регулируемого ЭП: прежде всего это относится к пусковым и тормозным режимам АД.
Следует отметить, что пуск АД проводят при уменьшенной частоте и по мере его ускорения частоту тока, подаваемого на статор, увеличивают.
Увеличенный пусковой момент способствует большему ускорению ротора АД и уменьшает время пуска, что очень важно для ЭП работающих в повторно-кратковременном режиме. В последующем для увеличения угловой скорости ротора АД до номинальной частоту тока статора постепенно увеличивают. Если в процессе ускорения вращения ротора частоту увеличивать медленно, то при работе на каждой частотной характеристике АД достигает угловой скорости на ее рабочей части и переход на большую скорость не сопровождается большими бросками тока. Такой частотный пуск называется «мягким». При «мягком» пуске АД потери энергии и потребляемая энергия сравнительно невелики, но увеличивается время пускового процесса. Если же скорость изменения частоты тока статора большая, то ротор АД не успевают достичь скорости, соответствующей критическому скольжению и переход с одной частотной характеристики на другую происходит в области их неустойчивых частей. Такой режим частотного пуска, характерный большими значениями тока и потерь, называют «жестким».
Очевидно, в ТПЧ наиболее рационально устанавливать такую скорость изменения частоты тока, при которой переход с одной частотной механической характеристики на другую будет происходить при максимальных моментах. Указанное условие будет выполняться, когда темп или ускорение частоты тока в статоре будет одинаковым с ускорением ротора.
На судах ТПЧ применяют в основном в реверсивных ЭП для которых характерны режимы торможения противовключением и рекуперативный.
Применение ТПЧ позволяет предварительно понизить частоту тока, подаваемого на статор АД, при этом пропорционально уменьшится индуктивное сопротивление ротора, соs ф увеличится и это приведет к увеличению тормозного момента (соответственно время тормозного процесса сокращается). Одновременно при уменьшении частоты тока мгновенно снижается угловая скорость поля статора и скорость ротора оказывается выше скорости поля статора. Это способствует работе АД на небольшом отрезке времени в режиме рекуперации, что дополнительно сокращает время реверса.
Режим рекуперации может быть не только при реверсе, но и при регулировании угловой скорости в сторону уменьшения, когда приходится снижать частоту тока статора. В подобных случаях, так же как и в предыдущем, переход работы АД с одной механической характеристики на другую происходит в зоне рекуперативного торможения, Переход сопровождается бросками тока, значения которых зависят от скорости изменения частоты. Аналогично, как и при пуске, переходный режим может быть «мягким» и «жестким». Для уменьшения бросков тока и потерь при регулировании стремятся скорость уменьшения частоты иметь небольшую, т.е. переходный процесс выполняют по возможности «мягким». Задавая определенные законы изменения частоты с помощью системы управления ТПЧ, можно получить гамму механических характеристик АД, отвечающих оптимальному режиму работы АД.
2. Регулирование угловой скорости АД с помощью тиристоров
Кроме рассмотренного частотного управления АД, тиристорные схемы позволяют изменять угловую скорость АД и другими способами. Регулирование угловой скорости благодаря переключающим способностям тиристоров в этих схемах построено на изменении рабочих параметров АД, которое достигается:
1.изменением напряжения, подаваемого на статор:
2.импульсным регулированием в цепи ротора;
3.введением добавочной ЭДС в цепь ротора.
Изменение напряжения, подаваемого на статор. При изменении напряжения тиристорным регулятором изменяется магнитный поток статора, а это приводит к изменению вращающего момента АД: тем самым нарушается условие равновесия, которым характеризуется установившееся движение. В случае уменьшения напряжения вращающий момент становится меньше момента сопротивления и ротор АД будет замедляться. Уменьшение скорости приводит к увеличению скольжения, ЭДС, тока ротора и вращающего момента, Когда при замедлении наступит равновесие моментов, то ротор АД будет вращаться с новой установившейся скоростью, которая будет меньше, чем до снижения напряжения на зажимах статора.
Применение тиристорных регуляторов напряжения позволяет осуществлять плавный пуск АД путем постепенного уменьшения угла α, а также динамическое торможение.
Устройство регуляторов напряжения значительно проще и дешевле описанных ранее схем ТПЧ. Однако КПД двигателей с регуляторами напряжения невысок, поэтому приходится увеличивать габаритные размеры АД во избежание превышения допустимой температуры вследствие роста тока и ухудшения вентиляции.
На судах тиристорные регуляторы напряжения используются в ЭП кранов и лебедок, где большие моменты при малых угловых скоростях требуются лишь в течение небольшой части рабочего цикла.
Импульсное регулирование в цепи ротора. Сущность импульсного регулирования состоит в том. что для изменения угловой скорости АД осуществляется периодическое кратковременное изменение его параметров, благодаря чему дозируется поток энергии, передаваемой от сети к АД и в обратном направлении.
Следует отметить, что вследствие небольшого значения мощности, необходимой для управления тиристорным ключом, данный способ позволяет получить бесступенчатое плавное изменение угловой скорости. Механические характеристики АД при данном способе регулирования можно получить более жесткими по сравнению с реостатными, так как при изменении нагрузки на валу АД имеется возможность изменять управляющий сигнал таким образом, чтобы скорость практически не менялась.
Введение добавочной ЭДС в цепь ротора. Путем подключения к цепи ротора АД независимого источника энергии переменная ЭДС этого источника подается в противофазе с ЭДС ротора.
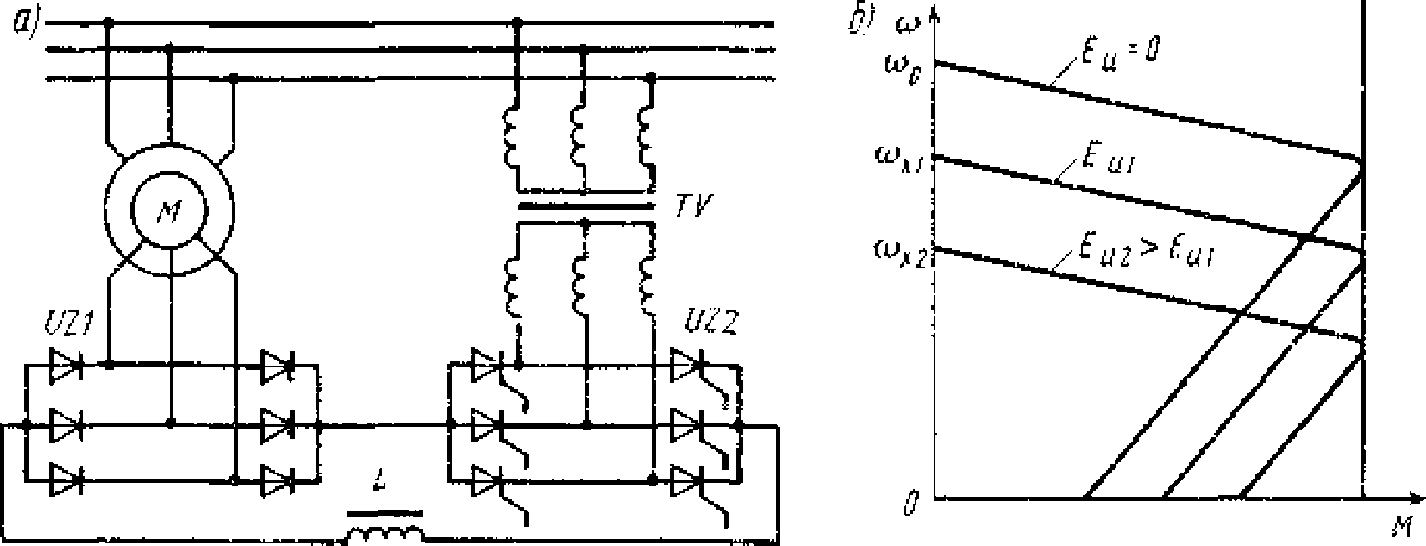
| Рис. 54. Схема регулирования асинхронного двигателя введением добавочной ЭДС (а) и его механические характеристики при различных ЭДС" инвертора {б) |
Способ регулирования введением добавочной ЭДС связан с преобразованием энергии постоянного тока в переменный или наоборот, поэтому указанные схемы имеют пониженные значения коэффициента мощности и КПД. Такой способ регулирования наиболее целесообразен лишь при небольшом диапазоне регулирования скорости ЭП, что в условиях судна применимо для отдельных насосов,








