 2015-02-04
2015-02-04 984
984Тема: 15 – Общие ведомости о промышленных роботах.
16 – Захватные приспособления промыщленных роботов.
План:
1. Сварочный робот.
2. Технические данные сварочных роботов.
Возможности комплексной автоматизации производства сварных конструкций значительно возрастаю! в связи с созданием сварочных роботов. Сварочный робот — это машина-автомат. Обычная машина-автомат является специальным устройством, рассчитанным для сварки одной сборочной единицы. Сварочный робот — универсальная быстропереналаживаемая машина-автомат с программным управлением. По эффективности действия сварочный работ не уступает специальным сварочным машинам-автоматам, ко в отличие от них работ после окончания заданной работы может быть быстро переналажен на выполнение другой работы. Сварочные роботы позволяют автоматизировать операции, которые до последнего времени либо не поддавались механизации, либо их механизация оказывалась экономически нецелесообразной. Так роботы находят эффективное применение при сварке коротких и труднодоступных швов, а также при сварке изделий в условиях мелкосерийного производства. Наряду с этим роботы позволяют освободить человека от монотонного, тяжелого, утомительного, вредного и опасного труда.
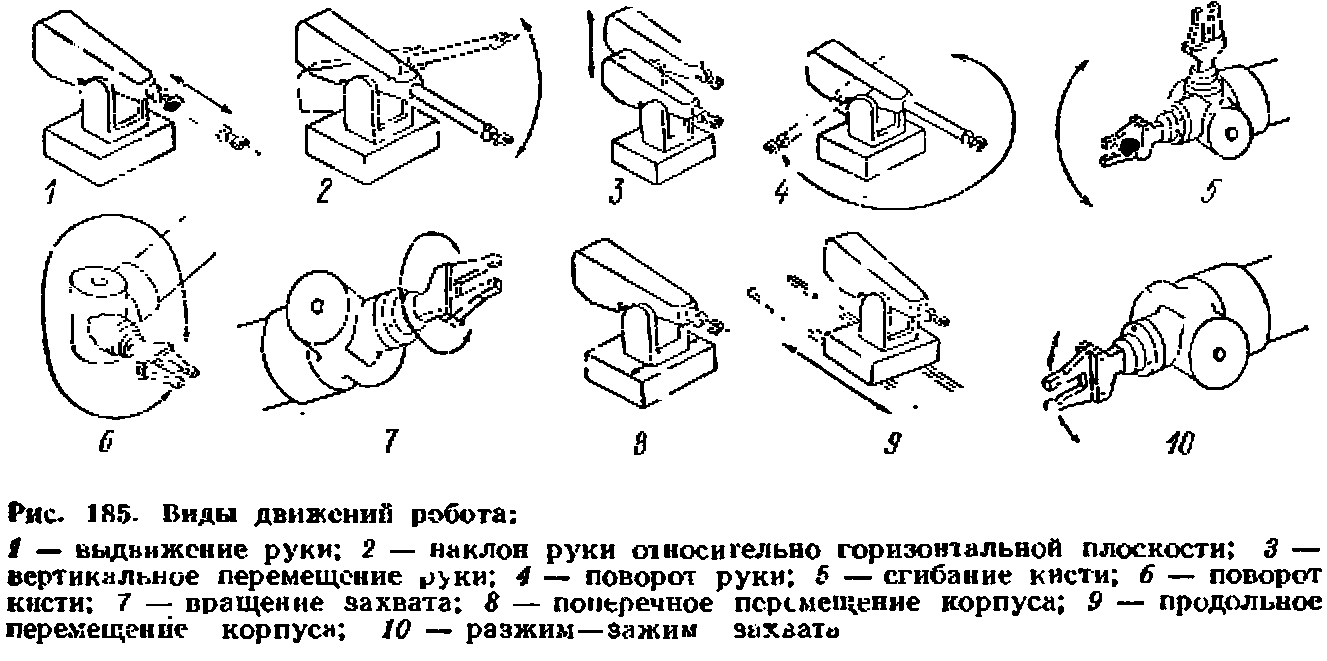
Сварочный робот состоит из собственно робота (или манипулятора) и пульта управления. Робот имеет подвижную руку и шарнирную кисть с захватом, в котором закрепляются сварочные клещи (при контактной точечной сварке) или сварочная горелка (при дуговой сварке). Сварочные роботы имеют 4—6 движений (степеней свободы). Большинство сварочных роботов имеет 5 движений: три движения руки и два движения кисти. Комбинирование этих движений позволяет устанавливать сварочные клещи или горелку в любых направлениях и положениях в пределах зоны действия робота. Набор видов движений (рис. 185) при одинаковом их числе может быть различным и зависит от конструкции робота.
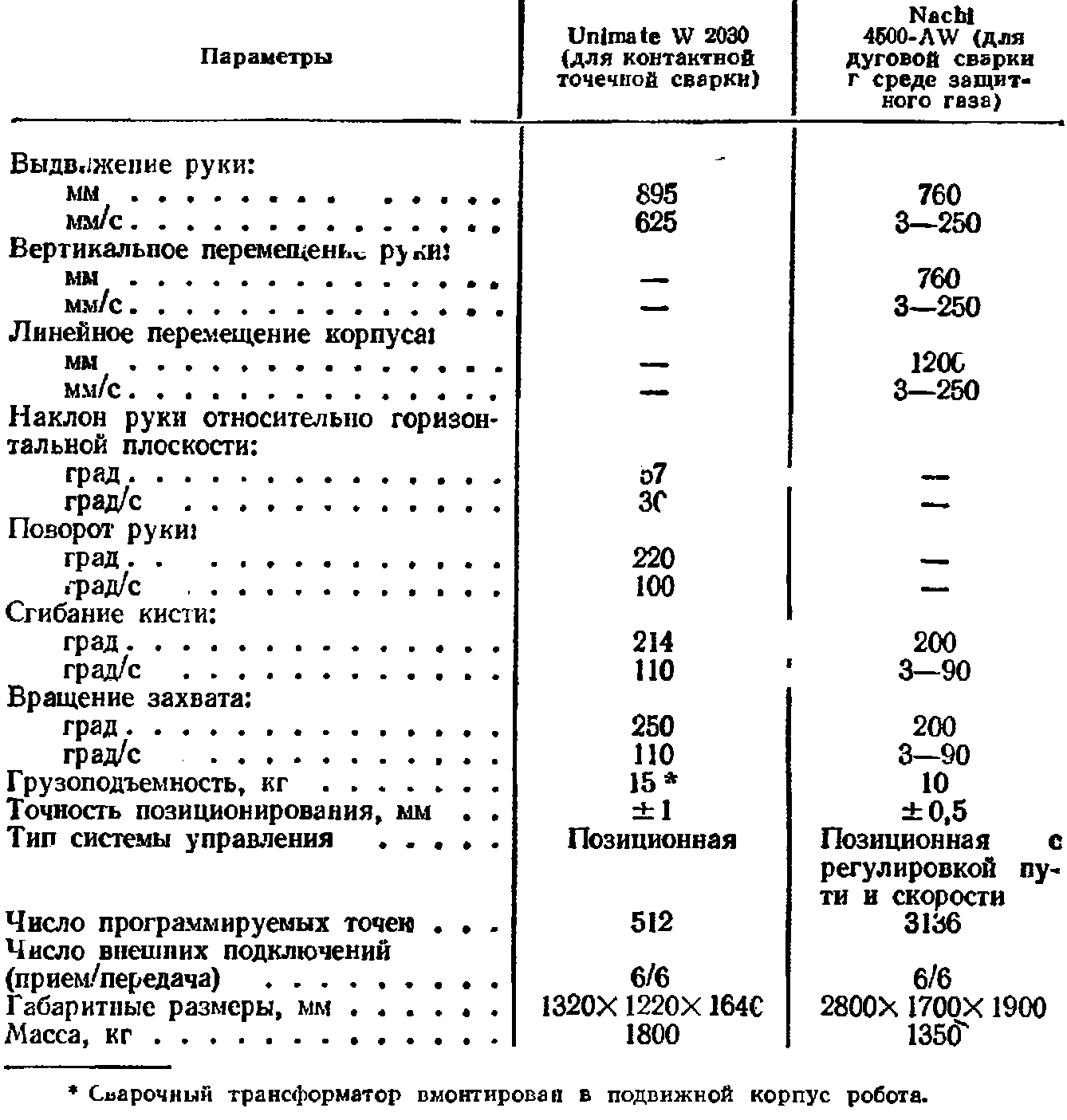
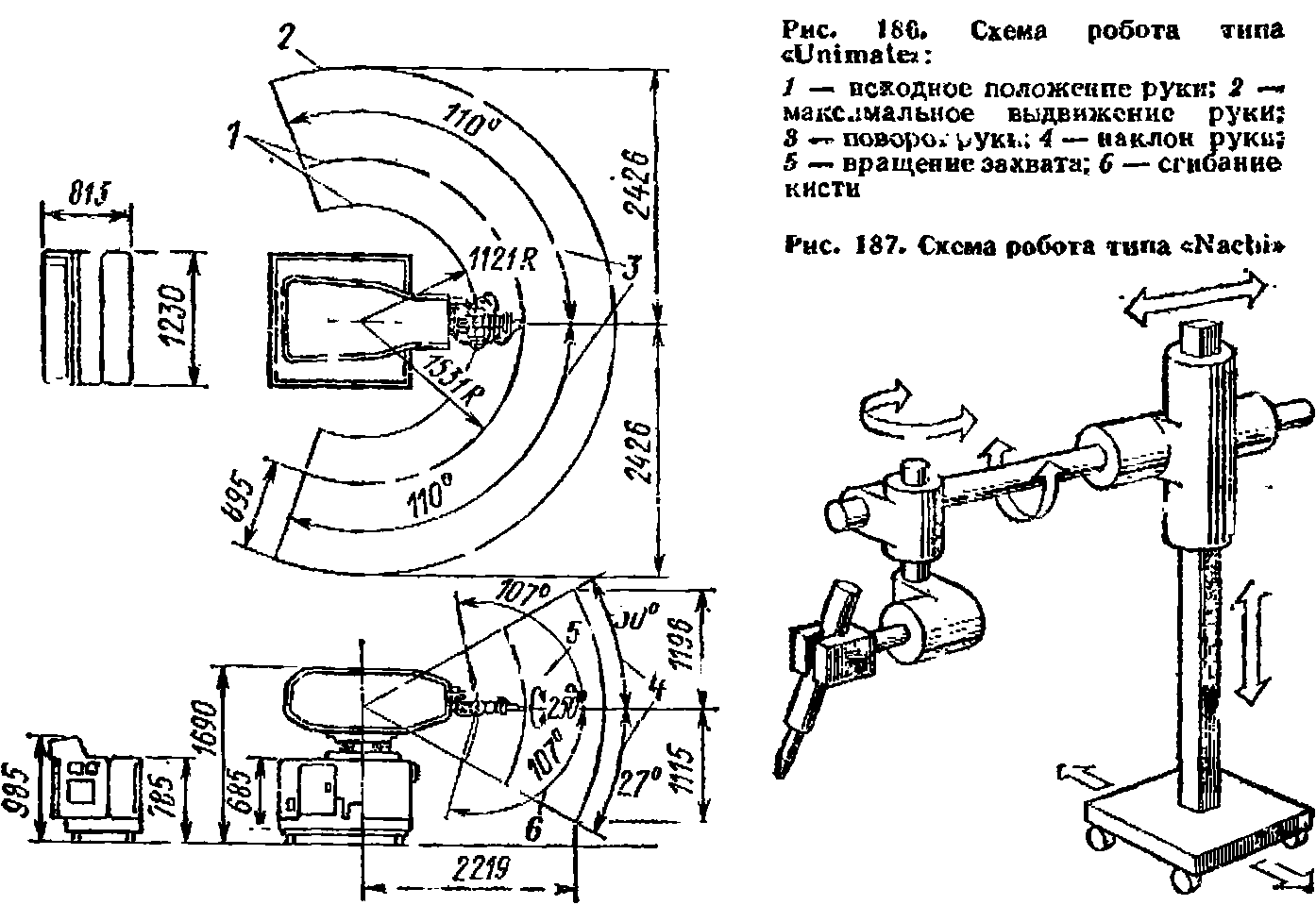
В качестве приводов движений робота в большинстве случаев используют электрогидравлические приводы. В настоящее время наибольшее распространение получили две конструктивные схемы сварочных роботов (табл. 23): 1) с перемещением руки в сферической системе координат типа «Unimate» (США, рис. 186); 2) с перемещением руки в прямоугольной системе координат типа «Nachi» (Япония, рис. 187). Для управления роботами используют позиционную (от точки к точке), контурную (плавная) или смешанную системы, обеспечивающие движение исполнительного органа одновременно по нескольким или всем координатам. Программоносителями служат магнитная лента, магнитный барабан, перфолента. Запись программы осуществляется двумя способами: 1) при обучении робота при первом проходе, выполняемом вручную или с помощью клавишного командного устройства; 2) с применением внешней системы и использованием вычислительной техники.
Таблица 23
Технические данные сварочных роботов тина «Unimate» и «Nachi»
Большинство роботов программируется способом обучения. Процесс программирования состоит в том, что исполнительный орган вручную последовательно устанавливается в требуемые положения и после каждой установки нажатием кнопки на панели управления соответствующие координаты фиксируются в памяти машины. Затем в промежутке между зарегистрированными позициями вводятся такие параметры, как скорость, продолжительность остановки, ускорения, замедления и т. п.
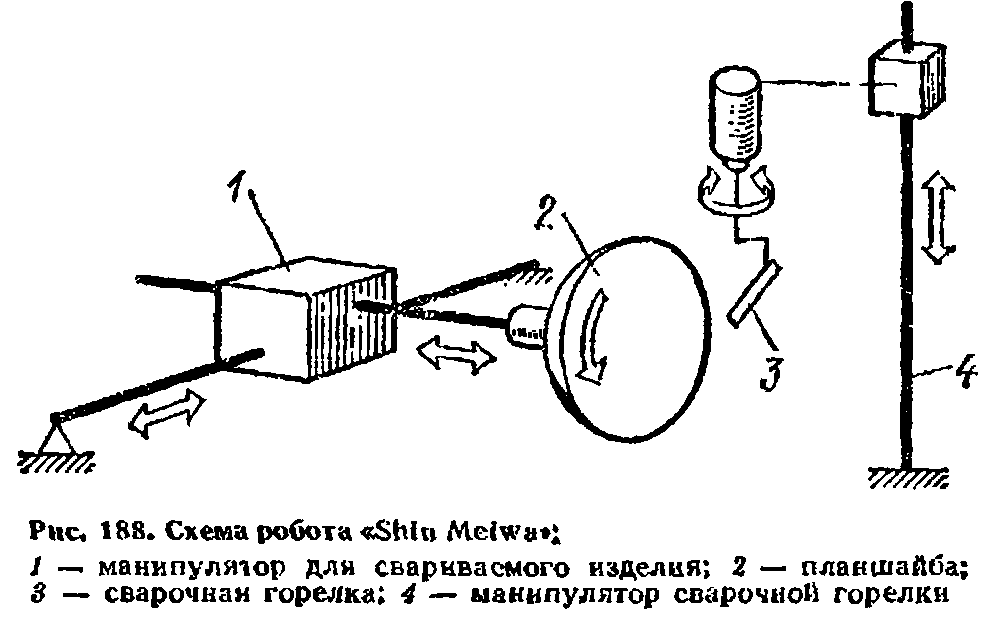
Сварочные роботы используют как отдельно стоящее оборудование, так и в автоматических линиях. Например, в автоматической линии контактной точечной сварки кузовов легковых автомобилей установлено 25 роботов типа «Unimate». В ряде случаев целесообразно разделить функции между механизмом перемещения сварочной горелки и манипулятором, служащим для перемещения свариваемых изделий. Оба устройства работают совместно по единой программе (рис. 188). В сварочном производстве роботы могут быть использованы также в качестве транспортных средств, выполняющие установку и снятие свариваемых изделий и работающих в сочетании со специальными сварочными машинами-автоматами. Кроме того, роботы могут быть эффективно использованы для выполнения заготовительных и сборочных операций.
В настоящее время используют роботы первого поколения, работающие по заданной жесткой программе. Следующее второе поколение роботов будет обладать техническими «зрением» и «осязанием» и их движения будут совершаться в зависимости от окружающей обстановки.
1. Что такое роботы? Для чего они применяются в сварочном производстве?
2. Перечислите основные разновидности роботов. Какие движения они осуществляют?
Литература:
Базовая:
1. А.Д. Гитлевич, Механизация и автоматизация сварочного производства, М., Машиностроение, 1979г. – стр.290.
Вспомогательная:
1. С.А. Куркин, Сварные конструкции, М., Высшая школа, 1991г. – стр.398;
2.М.С. Львов, Автоматика и автоматизация сварочных процессов, М., Машиностроение, 1982г. – стр.302;
3.В.А. Тимченко, А.А. Сухомлин, Роботизация сварочного производства, К., Техника, 1989г. – стр.175;
4.Г. Герден, Сварочные работы, М., Машиностроение, 1988г. – стр.288;
Методические указания к выполнению практических работ по дисциплине «Технологическое оборудование.








