 2015-02-24
2015-02-24 420
420Теория механизмов и машин (ТММ) – наука, изучающая общие методы структурного и динамического анализа и синтеза различных механизмов, механику машин.
Машина – Комплекс устройств, выполняющих механические движения для преобразования энергии, материалов и информации с целью механизации и автоматизации трудовых процессов человека.
В зависимости от назначения различают: энергетические, транспортные, информационные и технологические машины.
Энергетические машины – преобразуют любой вид энергии в механическое движение и наоборот.
Транспортные машины – служат для изменения положения материалов или других объектов.
Информационные – предназначены для получения и преобразования информации.
Технологические – преобразуют материал с изменением его размеров, формы, свойств, состояния для выполнения рабочих процессов производства.
Технологические машины состоят из: двигателя, передачи, исполнительного органа, механизмов контроля и управления.
Передаточный механизм – устройство передачи энергии от двигателя к исполнительному органу с помощью преобразования механической энергии.
Любой механизм состоит из звеньев.
Звено – твердое тело (деталь) или совокупность нескольких деталей соединенных между собой в одну неизменяемую механическую систему.
Если звенья механизма движутся параллельно одной плоскости (участвуют в плоском движении), то механизм называется плоским.
Неподвижное звено называется стойкой или корпусом (обозначается -0).
Звенья в механизме соединяются с помощью кинематических пар.
Кинематическая пара – подвижное соединение двух звеньев, допускающее их относительное движение.
Контакт звеньев в кинематической паре может происходить в точке, линии (высшие кинематические пары) или по поверхности (низшиекинематические пары). Зона контакта называется элементом кинематической пары. Постоянный контакт звеньев в кинематической паре обеспечивается за счет конструктивной формы звеньев (геометрическое замыкание) или с помощью прилагаемых усилий (пружины, жидкости, силы и т.п.) – силовое замыкание. Через кинематические пары происходит передача усилий от одного звена к другому.
2 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
При структурном анализе механизма составляется его структурная схема, на которой показываются звенья, входящие в механизм и кинематические пары, соединяющие эти звенья. При этом размеры звеньев не учитываются. Структурный анализ механизма позволяет определить его технологичность и число независимых обобщенных координат однозначно определяющих положение всех звеньев механизма.
2.1 Классификация звеньев
Звенья можно классифицировать по следующим признакам:
1) по функциональному назначению ( Рис 2.1 );
а) Кривошип (1) – Образует вращательную кинематическую пару со стойкой (0) и совершает полный оборот.
б) Коромысло (1) - Образует вращательную кинематическую пару со стойкой (0) и совершает не полный оборот.
в) Ползун (1) – Образует поступательную кинематическую пару со стойкой (0).
г) Шатун (1) – Не образует кинематических пар со стойкой (0) и совершает плоскопараллельное движение.
д) Кулиса (1) – Образует вращательную кинематическую пару со стойкой (0) и поступательную пару с другим звеном (кулисным камнем) (2).
2) по силовому воздействию:
а) Ведущее - для которого работа внешних сил положительная.
б) Ведомое - для которого работа внешних сил отрицательная.
3) По числу геометрических элементов: простое, двойное, тройное и т.д.
Кроме того различают входное звено, которому сообщается движение, преобразуемое механизмом. (их число равно числу степеней свободы механизма) и выходное, совершающее движение, для которого предназначен механизм.
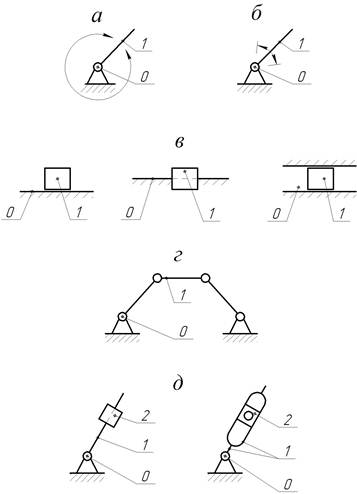
Рис. 2.1
2.2 Классификация кинематических пар








