 2015-02-24
2015-02-24 4303
4303Плоские механизмы могут иметь звенья, входящие, как в низшие, так и в высшие кинематические пары. При изучении их структуры и кинематики удобно заменять высшие кинематические пары низшими 5-го класса. При этом необходимо выполнение следующих условий:
1)Должна сохраняться степень подвижности механизма.
2) Сохраняется относительное движение звеньев в данном положении механизма.
Механизмы, в которых высшие кинематические пары заменены низшими при выполнении вышеперечисленных условий называются заменяющими механизмами. Рассмотрим принцип построения плоских заменяющих механизмов. Пусть задан механизм с высшей кинематической парой (Рис 2.8а), где (а) и (в) произвольно заданные кривые, соприкасающиеся в точке (с).
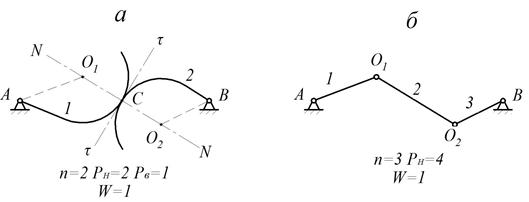
Рис. 2.8
- В точке (с) проводим нормаль (N-N).
-Отмечаем центры кривизны этих кривых (точки О1 и О2).
-Заменяем исходный двухзвенный механизм с высшей кинематической парой трехзвенным (Рис 2.8б).
При такой замене, как видно из Рис 2.8, подвижность механизма не изменяется.
С другой стороны, так как окружности радиусов О1С и О2С эквивалентны исходным кривым (а) и (в) с точностью до производных второго порядка, скорости и ускорения всех точек заменяющего механизма будут равны скоростям и ускорениям соответствующих точек исходного механизма.
Заменяющий механизм строится для заданного положения исходного. В другом положении размеры звеньев заменяющего механизма в общем случае будут другими, но структурная схема останется такой же. На Рис.2.9 приведены примеры построения заменяющих механизмов.
Если все высшие кинематические пары заменить низшими, то подвижность механизма согласно формуле Чебышева определится как:
 . (2.4)
. (2.4)
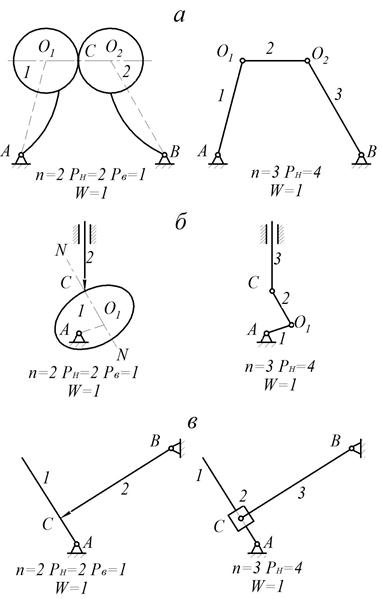
Рис. 2.9
2.7 Структурные группы Ассура и их классификация
Основной принцип образования механизмов был впервые сформулирован Л. Н. Асуром в 1914г. Им был предложен и развит метод образования механизмов путем последовательного наслоения кинематических цепей, обладающих определенными структурными свойствами. Рассмотрим, например, механизм, изображенный на Рис 2.10а, где в качестве ведущего звена выберем кривошип 1.
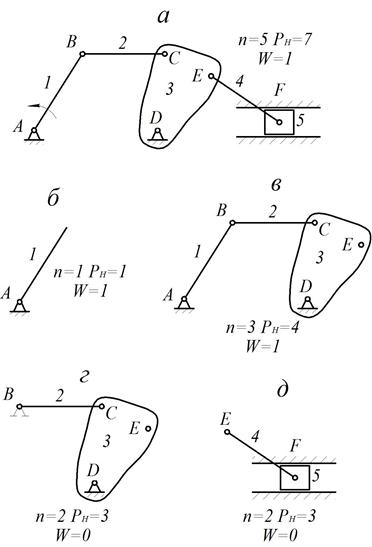
Рис. 2.10
Степень подвижности этого механизма W=1. Степень подвижности ведущего звена 1 равна W-1. Ведомые звенья 2,3,4,5 образуют кинематическую цепь с нулевой степенью подвижности. Процесс образования этого механизма можно представить как присоединение к ведущему звену 1 и стойке 0 кинематической цепи 2,3. тогда получим четырехзвенный механизм АВСД, который после присоединении его свободного звена 2 к стойке, приобретет степень подвижности W=1 Рис 2.10в. Далее для получения исходного механизма к звену 3 присоединим группу, состоящую из звеньев 4 и 5 также обладающую нулевой степенью подвижности (Рис 2.10д).
Следовательно, исходный механизм образован присоединением к ведущему звену 1 и стойке 0 двух групп (2,3) и (4,5).
Группа Ассура – кинематическая цепь с нулевой степенью подвижности относительно тех звеньев, с которыми входят в кинематические пары свободные элементы ее звеньев, и не распадающуюся на более простые цепи.








