 2015-02-27
2015-02-27 499
499Пояснительная записка к примеру выполнения курсовой работы. СИЛОВОЙ АНАЛИЗ ПЛОСКОГО РЫЧАЖНОГО МЕХАНИЗМА
Целью силового расчёта механизма является определение реакций в кинематических парах и уравновешивающего момента, приложенного к ведущему звену.
Силовой анализ механизма выполняется в следующей последовательности:
· Структурный анализ. Разбиение механизма на структурные группы и начальное звено, образующее кинематическую пару со стойкой;
· Кинематический анализ. Определение положений звеньев механизма. Определение скоростей и ускорений точек и звеньев механизма;
· Определение сил тяжести звеньев:
· Определение сил инерции звеньев;
· Силовой анализ каждой структурной группы в отдельности, начиная с группы, наиболее удалённой от начального звена;
· Силовой расчёт начального звена. Определение реакции стойки и уравновешивающего момента;
· Определение уравновешивающего момента с использованием рычага Н.Е. Жуковского. Сравнение полученных результатов.
Рассмотрим силовой анализ на примере механизма двигателя внутреннего сгорания.
Исходные данные
Кинематическая схема исследуемого механизма изображена на рисунке 3.1 Механизм содержит кривошип 1, два шатуна - 2 и 4, два поршня - 3 и 5, на которые действуют силы давления газов в соответствии с индикаторной диаграммой. Точки S2 и S4 являются центрами масс шатунов 2 и 4. Кривошип 1 вращается с постоянной угловой скоростью ω1 = 200 рад/с. Задан угол φ1 = 60°, определяющий положение звена 1 в исследуемом положении механизма.
Размеры звеньев:
lОА = lОС = 0,048 м,
lАВ = lCD = 0,192 м,
lAS2 = lCS4 = 0,064 м.
Массы звеньев:
m1 = 5 кг,
m2 = m4 = 3,2 кг,
m3 = m5 = 4 кг.
Центральные моменты инерции звеньев:
JS2 = JS4 = 0,014 кг*м2.
Диаметры поршней:
d3 = d5 = 0,08 м.
Максимальное индикаторное давление в левом и правом цилиндрах:
Рi max = 4,8 мПа.
Структурный анализ механизма
Определим число степеней свободы механизма по формуле П.Л. Чебышева. W=3n-2p1-p2 = 3 * 5 - 2 * 7 - 0 = 1, где
n = 5 - число подвижных звеньев,
p1 = 7 - число одноподвижных (низших)кинематических пар (0-1, 1-2, 2-3,3-0, 1-4, 4-5, 5-0),
p2 = 0 - число двухподвижных (высших) кинематических пар.
Таким образом, положения всех звеньев механизма определяются одной обобщенной координатой, которая представлена углом φ1. Звено 1, к которому приписана обобщённая координата φ1 в данном примере, является начальным.
После выделения из механизма начального звена 1 со стойкой оставшаяся кинематическая цепь разбивается на две структурные группы второго класса и второго вида. Одна группа, содержит звенья 2 и 3, а другая - звенья 4 и 5. Механизм в целом, следовательно, относится ко второму классу. На рисунке 3.1 изображены отдельно начальное звено 1, образующее вращательную пару со стойкой, и каждая структурная группа в отдельности.
Планы положений механизма
Примем масштабный коэффициент для построения плана положений механизма µl = 0,004 м/мм.
Определим длины отрезков, изображающих звенья механизма на чертеже:
ОА = lОА / µl = 0,048 / 0,004 = 12 мм, ОС = О А,
АВ = lAB / µl = 0,192 / 0,004 = 48 мм, CD = АВ,
AS2 = lAS2 / µl = 0,064 / 0,004 = 16 мм, CS4 = AS2.
Изобразим на рисунке 3.1 сначала направляющую ось х, на которой выберем произвольно неподвижную опору О. Изобразим положение отрезка ОА под углом φ1 = 60° к оси х, и отрезка ОС перпендикулярного к ОА. Затем методом засечек построим положения отрезков АВ и CD, изображающих звенья 2 и соответственно, в заданном положении механизма. На отрезках АВ и CD отметим точки S2 и S4. Изобразим крайние положения механизма. Для этого построим крайние положения ползуна 3, которым соответствуют точки В' и В", а также крайние положения ползуна 5, которым соответствуют точки D' и D". Обозначим ход ползуна 3 через В'В". Ход ползуна 5 обозначим через D'D".
В'В" = D'D" = Н = 2* ОА = 2 *12 = 24 мм.
Определим полный ход звена 3:
h=H* µl = 24 * 0,004 = 0,096 м,
где Н = 24 мм - расстояние между точками В' и В" на чертеже.
Полный ход звена 5 будет равен полному ходу звена 3.
План скоростей механизма
Определим скорость точки А по величине.
VA = lOA* ω1 = 0,048 * 200 = 9,6 м/с.
Скорость точки С по величине равна скорости точки А.
Примем длину вектора ра, изображающего на чертеже скорость точки А, равной 24 мм. Это число выбираем кратным величине скорости точки А. Тогда масштабный коэффициент для построения плана скоростей будет следующим:
µv = VA/ра =9,6 / 24 = 0,4 (м/с) / мм.
Изобразим на чертеже вектор ра, направленный перпендикулярно отрезку ОА, учитывая направление вращения звена 1. Точка р является полюсом плана скоростей. Поместим в полюс р точку о, соответствующую неподвижной точке О механизма.
Составим векторное уравнение для скорости точки В.
VB = V A + V BA,
где VB - скорость точки В, направленная параллельно оси х;
VA - скорость точки А;
VBA ~ скорость точки В при относительном вращении звена 2 вокруг точки А (направлена перпендикулярно АВ).
Данное векторное уравнение решим графически. Для этого на плане скоростей проведём через точку а прямую линию, перпендикулярную АВ, а через полюс р - прямую, параллельную оси х. Точка пересечения этих прямых даст точку b - конец вектора скорости точки В.
Точку S2 на плане скоростей найдём, используя свойство подобия планов.
 , откуда as2 = аb
, откуда as2 = аb  = 12
= 12  = 4 мм
= 4 мм
где as2 и ab - длины отрезков на плане скоростей,
AS2 и АВ - длины отрезков на плане положения.
Изобразим на чертеже вектор рс, изображающий скорость точки С и направленный перпендикулярно отрезку ОС, учитывая направление вращения звена 1. Причём длины векторов рс и ра одинаковы.
Составим векторное уравнение для скорости точки D.
VD = V C + V DC,
где VD - скорость точки D, направленная параллельно оси х,
VC - скорость точки С,
V DC ~ скорость точки D при относительном вращении звена 4 вокруг точки С (направлена перпендикулярно CD).
Данное векторное уравнение решим графически. Для этого на плане скоростей проведём через точку с прямую линию, перпендикулярную CD, а через полюс р - прямую, параллельную оси х. Точка пересечения этих прямых даст точку d - конец вектора скорости точки D.
Точку s4 на плане скоростей найдём, используя свойство подобия планов.
 , откуда CS4 = cd
, откуда CS4 = cd  = 20 = 6,6 мм,
= 20 = 6,6 мм,
где CS4 и cd - длины отрезков на плане скоростей,
CS4 и CD - длины отрезков на плане положения.
Определим скорости точек В, D, S2 и S4 механизма по величине.
VB = рb * µv = 22 * 0,4 = 8,8 м/с,
VD = pd * µv = 15 * 0,4 = 6,0 м/с,
Vs2 =ps2· µv = 22 * 0,4 = 8,8 м/с,
Vs4 = ps4· µv = 18 * 0,4 = 7,2 м/с,
где pb, pd, ps2 и ps4 - длины отрезков на плане скоростей.
Определим величины относительных скоростей.
VBA = ab * µv = 12 * 0,4 = 4,8 м/с,
VDC = cd * µv = 20 * 0,4 = 8,0 м/с,
где ab и cd - длины отрезков на плане скоростей.
Определим угловые скорости звеньев 2 и 4.
ω2 = VBA/ lAB = 4,8 / 0,192 = 25 рад/с,
ω4 = VDC / lICD = 8,0 / 0,192 = 41 рад/с.
Направления угловых скоростей ω2 и ω4 определяются направлениями относительных скоростей VBA и VDC, как это показано на рисунке 3.1.
План ускорений механизма
Определим ускорение точки А. Так как по условию ω1 = const, то
аА = anA = 1OA * ω21 = 0,048 * 2002 = 1920 м/с2.
Примем длину отрезка πa, изображающего на чертеже ускорение точки А, равной 38,4 мм. Это число выбираем кратным величине ускорения точки А. Тогда масштабный коэффициент для построения плана ускорений будет следующим:
µa = аА / πa = 1920 / 38,4 = 50 (м/с2) / мм.
Изобразим на рисунке 3.1 вектор πa, направленный параллельно ОА (при этом учитывая, что вектор аА направлен от точки А к точке О). В полюс π плана ускорений поместим точку о, соответствующую неподвижной точке О механизма.
Ускорение точки С по величине равно ускорению точки А. На рисунке 3.1 изобразим вектор πc, изображающий ускорение точки С и направленный параллельно ОС (при этом учитывая, что вектор аC направлен от точки С к точке О).
Для определения ускорения точки В составим векторное уравнение
аB = аА + аnBА + аtBА,
где аА - вектор ускорения точки А,
аnBА и аtBА - векторы нормального и касательного ускорений точки В при вращении звена 2 вокруг точки А. Вектор аnBА направлен параллельно АВ (от точки В к точке А). Вектор аtBА направлен перпендикулярно АВ.
Определим по величине ускорение аnBА
аnBА =V2BA/ lAB = 4,82 / 0,192 = 120 м/с2.
Определим длину вектора an1, изображающего ускорение аnBА на плане ускорений с учётом масштабного коэффициента.
an1 = аnBА / µa = 120 / 50 = 2,4 мм.
Векторное уравнение, связывающее ускорение точек В и А, решим графически. Поместим в точку а на плане ускорений начало вектора an1, изображающего ускорение аnBА. Через точку n1 проведём прямую линию перпендикулярную АВ, по которой будет проходить вектор аtBА. Через точку π проведём прямую линию параллельную оси х, по которой проходит вектор аB. Точка пересечения этих прямых даст конец вектора πb, изображающего ускорение аB.
Точку s2 на плане ускорений найдём по свойству подобия планов из соотношения
as2 = ab = 33 = 11 мм,
где as2 и аЬ - длины отрезков на плане ускорений,
AS2 и АВ - длины отрезков на плане положения механизма.
Для определения ускорения точки D составим векторное уравнение
аD = аC + аnDC + аtDC,
где аC - вектор ускорения точки С,
аnDC и аtDC - векторы нормального и касательного ускорений точки D при вращении звена 4 вокруг точки С. Вектор аnDC направлен параллельно CD (от точки D к точке С). Вектор аtDC направлен перпендикулярно CD.
Определим по величине ускорение аnDC
аnDC = V2DC / lCD = 82 / 0,192 = 333 м/с2.
Определим длину вектора cn2, изображающего ускорение аnDC на плане ускорений с учётом масштабного коэффициента.
cn2 = аnDC / µa = 333 / 50 = 6,6 мм.
Векторное уравнение, связывающее ускорение точек С и D, решим графически. Поместим в точку с на плане ускорений начало вектора cn2, изображающего ускорение аnDC. Через точку n2 проведём прямую линию перпендикулярную CD, по которой будет проходить вектор аtDC. Через точку π проведём прямую линию параллельную оси х, по которой проходит вектор аD Точка пересечения этих прямых даст конец вектора πd, изображающего ускорение аD.
Точку s4 на плане ускорений найдём по свойству подобия планов из соотношения
cs4 = сd  = 18 = 6 мм,
= 18 = 6 мм,
где cs4 и cd - длины отрезков на плане ускорений,
CS4 и CD - длины отрезков на плане положения механизма.
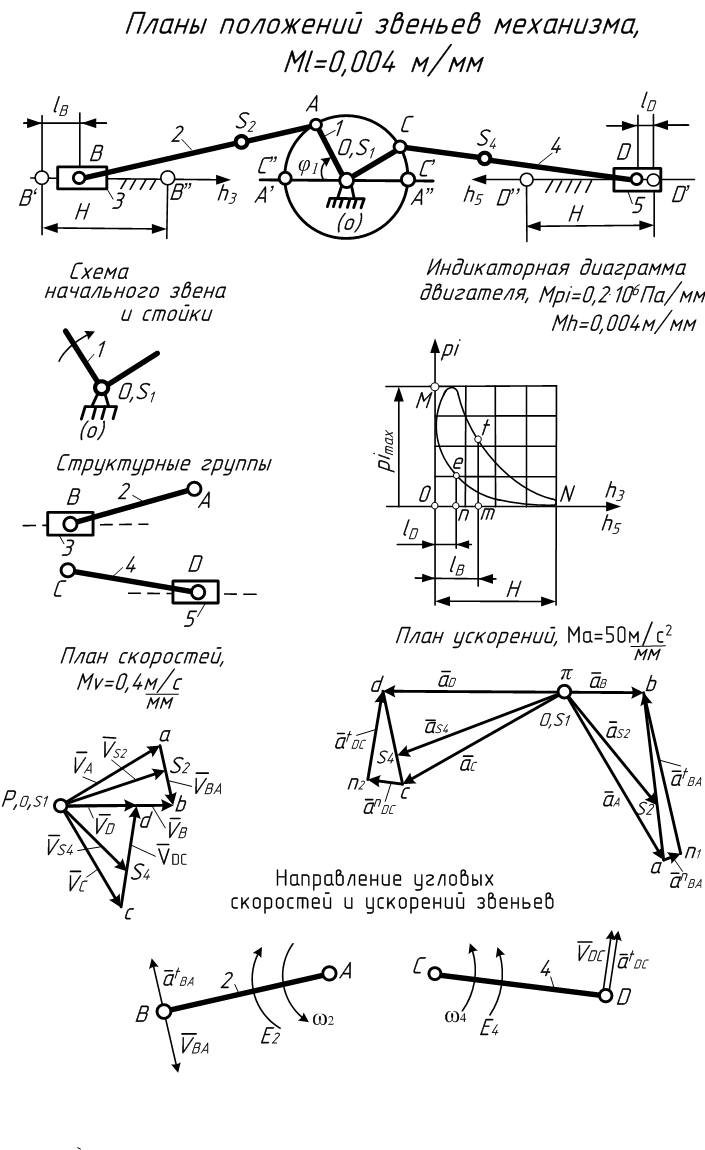
Рисунок 3.1. Механизм двигателя внутреннего сгорания
Определим ускорения точек механизма по величине:
аB = πb * µa = 15 * 50 = 750 м/с2,
ad = πd * µa = 36 * 50 = 1800 м/с2,
aS2 = πs2 * µa = 28 * 50 = 1400 м/с2,
aS4 = πs4 * µa = 35 *50 = 1750 м/с,
где πb, πd, πs2, πs4 - длины отрезков на плане ускорений механизма.
Определим величины тангенциальных ускорений аtBА и аtDC
аtBА = n1b * µa = 32 * 50 = 1600 м/с2,
аtDC = n2d * µa = 17 * 50 = 850 м/с2,
где n1b и n2d - длины отрезков на плане ускорений механизма.
Определим угловые ускорения звеньев 2 и 4 по величине:
ε2 = аtBА / lAB = 1600 / 0,192 = 8333 рад/с2,
ε4 = аtDC / lCD = 850 / 0,192 = 4427 рад/с2.
Направления угловых ускорений s2 и s4 определяются направлениями касательных ускорений аtBА и аtDC, как это показано на рисунке 1.1.








