 2015-02-27
2015-02-27 2276
2276Математическое описание САУ может относиться как к статическим, так и к динамическим характеристикам.
Статическая характеристика – это зависимость выходной величины от входной (или управляемой от управляющей) в установившемся режиме.
Динамическая характеристика описывает переходный процесс, выраженный дифференциальным уравнением или зависимостью выходной величины от времени (переходной характеристикой).
Статические характеристики могут быть линейными, нелинейными, существенно-нелинейными.
Линейными являются системы, у которых каждый структурный элемент имеет линейную зависимость между входной и выходной величинами (рис. 1.5). Если хотя бы один элемент системы имеет нелинейную характеристику (рис. 1.6), то система является нелинейной или существенно-нелинейной, т.е. имеет кусочно-линейную характеристику (рис. 1.7), состоящую из отрезков прямой линии.
Известны нелинейности следующих типов: ограничение (рис. 1.8), нечувствительность (рис.1.9), нечувствительность с ограничением (рис. 1.10), люфт (рис.1.11), реле двухпозиционные (рис. 1.12) и трехпозиционные (рис. 1.13), а также те же нелинейности с гистерезисом (рис. 1.14).
 Рисунок. 1.5 – Статическая характеристика линейной системы Рисунок. 1.5 – Статическая характеристика линейной системы |  Рисунок 1.6 – Статическая характеристика нелинейной системы Рисунок 1.6 – Статическая характеристика нелинейной системы |
 Рисунок 1.7 – Статическая характеристика существенно-нелинейной системы Рисунок 1.7 – Статическая характеристика существенно-нелинейной системы |  Рисунок 1.8 – Нелинейность типа «ограничение» Рисунок 1.8 – Нелинейность типа «ограничение» |
 Рисунок 1.9 – Нелинейность типа «нечувствительность» Рисунок 1.9 – Нелинейность типа «нечувствительность» |  Рисунок 1.10 – Нелинейность типа «нечувствительность с ограничением» Рисунок 1.10 – Нелинейность типа «нечувствительность с ограничением» |
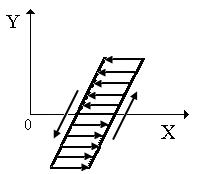 Рисунок 1.11 – Нелинейность типа «люфт» Рисунок 1.11 – Нелинейность типа «люфт» |  Рисунок 1.12 – Нелинейность типа «двухпозиционное реле» Рисунок 1.12 – Нелинейность типа «двухпозиционное реле» |
 Рисунок 1.13 – Нелинейность типа «трехпозиционное реле» Рисунок 1.13 – Нелинейность типа «трехпозиционное реле» |
 |  |
| Рисунок 1.14 – Нелинейности с гистерезисом |
По математическому описанию динамических характеристик системы делятся также на линейные, нелинейные и импульсные. Импульсная система отличается от непрерывной наличием импульсного элемента, осуществляющего квантование сигналов во времени.








