2015-02-27
2015-02-27 516
516До сих пор мы предполагали, что все элементы системы автоматического управления имеют линейные характеристики. Вместе с тем, если хотя бы один элемент системы, например датчик, имеет нелинейную статическую характеристику, то и вся система является нелинейной.
Поэтому фактически все реальные системы управления являются нелинейными. Для того чтобы использовать результаты, полученные выше для линейных систем, при расчёте нелинейных систем, последние необходимо линеаризовать. При этом линеаризация может осуществляться двумя способами. Если рабочий режим находится в ближайших окрестностях в точке А (рис.2.79), то через эту точку проводится касательная, которой и заменяют исходную нелинейную статическую характеристику. Если же рабочий режим одинаково вероятен в любой точке статической характеристики от О до А (рис. 2.80), то кривая заменяется прямой ОА.
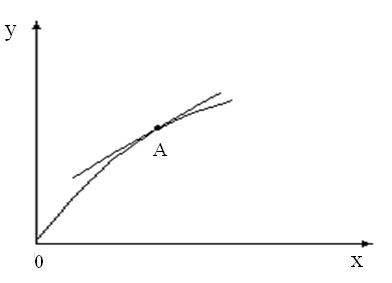
Рисунок 2.79 – Линеаризация статической
характеристики первым способом
Иными словами, наличие отдельных нелинейных элементов не является препятствием к тому, чтобы рассчитывать нелинейную систему в качестве линейной.
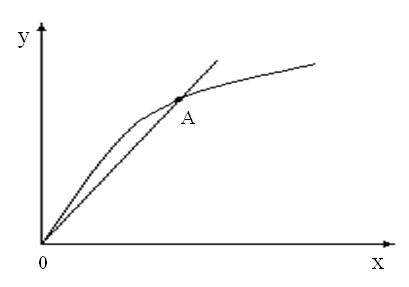
Рисунок 2.80 – Линеаризация статической
характеристики вторым способом
Гораздо сложнее обстоит дело в том случае, если хотя бы одним из элементов системы является существенно-нелинейный элемент (рис.1.7 – 1.14).
Такие системы имеют целый ряд особенностей, которые затрудняют применение для их анализа теории линейных систем. Эти особенности сводятся к следующему:
1. В линейных системах существует только одно понятие равновесия, в нелинейных таких положений может быть сколько угодно, причём эти положения могут быть как точками устойчивого, так и неустойчивого равновесия (раздел 2.6, рис. 2.57).
2. В нелинейных системах нельзя применять принцип суперпозиции, то есть суммарные реакции нелинейной системы на отдельные воздействия не равны сумме реакций на отдельные воздействия.
3. В нелинейных системах нельзя менять между собой местами отдельные элементы, то есть неприменимо свойство коммутативности.
4. Для исследования нелинейных систем нельзя применять преобразование Лапласа и полученные на основе этих преобразований передаточные функции.
5. В нелинейных системах могут появляться высшие гармоники, искажающие процесс.
6. В нелинейных системах при определённых условиях возникают незатухающие колебания (автоколебания).
7. Устойчивость нелинейных систем определяется не только структурой и параметрами системы, но и начальными условиями.
Наличие этих особенностей привело к применению специфических методов расчёта, основанных на их учёте. Среди этих методов отметим метод припасовывания, метод абсолютной устойчивости и метод гармонической линеаризации.