 2015-02-14
2015-02-14 4174
4174Снятие кинематической схемы станка
Цель работы
1. Ознакомиться с внутренним устройством и компоновкой узлов и механизмов станка.
2. Научиться самостоятельно разбираться в назначении механизмов и определять их взаимосвязь при работе станка.
3. Получить практические навыки составления кинематических схем станков, пользуясь принятыми условными обозначениями элементов этих схем, и составления уравнений кинематического баланса его кинематических цепей.
4. Научиться производить необходимые замеры.
Содержание работы
1. Внимательно ознакомиться и изучить устройство, расположение, назначение и взаимодействие механизмов станка.
2. Составить кинематическую схему станка.
3. Обозначить на схеме величины параметров звеньев кинематических цепей станка.
4. Написать уравнения кинематических цепей станка.
Основные понятия
Кинематическая цепь – это совокупность ряда передач – зубчатых, винтовых, реечных, ременных, храповых и других, осуществляющих передачу движений от начального звена к конечному, например, от электродвигателя к шпинделю (условные обозначения передаточных пар и механизмов металлорежущих станков по
ГОСТ 2.770–68 приведены в приложении 2).
| |||
| Рис. 1. Винторезная цепь токарного станка |
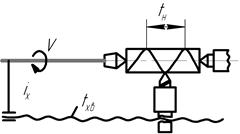
Уравнение кинематического баланса – это зависимость движения одного конечного звена кинематической цепи oт другого, например, шпинделя (заготовки) и суппорта (резца).
Для винторезной цепи (рис. 1) уравнение кинематического баланса (кратко – уравнение баланса) можно записать так:
 ,
,
где iх – передаточное, отношение органа настройки, например, гитары сменных колес; t хв – шаг ходового винта; tн – шаг нарезаемой резьбы.
Сокращенная запись уравнения баланса: 1 об.шп. → tн.
Кинематическая схема станка – его условное изображение совокупности его кинематических цепей в одной плоскости (плоскости чертежа). Назначение кинематической схемы станка – дать полное представление о том, как передается движение к исполнительным механизмам. Передачи и механизмы в схемах показывают наглядным контуром, напоминающим форму действующих устройств (прил. 2).
На кинематической схеме приводят данные, по которым настраивают станок – мощность и частоту вращения ротора электродвигателей, диаметры шкивов, числа зубьев зубчатых колес, модуль рейки, число заходов червяков, число заходов и шаг ходовых винтов.
В приложении 1 представлена кинематическая схема токарно-винторезного станка мод. 16K20 с проставленными числами зубьев зубчатых колес, диаметрами шкивов и другими данными.
Рассмотрим примеры составления уравнений баланса кинематических цепей станка.
1. Цепь главного движения (с перебором, реверсивная муфта включена влево). Конечные звенья цепи: электродвигатель М – шпиндель (вал У1 ); конечные перемещения: nдв → nшп.
Уравнение баланса (для положения, показанного на рисунке прил.1)
 ,
,
где nшп –частота вращения шпинделя, об/мин.
2. Винторезная цепь при нарезании специальных резьб или повышенной точности (муфты M1 в М2 включены, коробка подач отключена). Конечные звенья цепи: шпиндель – суппорт; конечные перемещения: 1 об.шп. → tн.
Уравнение баланса (блок Б5 в правом положении)
 ,
,
где а, в, с, d –числа зубьев сменных колес гитары; t хв – шаг ходового винта; tн – шаг нарезаемой резьбы.
3. Цепь продольной подачи (муфты M1 и М2 выключены, а муфты M3, М4, и M0 включены). Конечные звенья цепи: шпиндель – суппорт, конечные перемещения: 1 об.шп. → Sпр.
Уравнение баланса (блок Б5 в правом положении)
где а, в, с, d – числа зубьев сменных колес гитары; Sпр – продольная подача, мм/об; m – модуль рейки, m =3 мм.
4. Цепь поперечной подачи (муфты M1 и М2 выключены, а муфты M3, М4, и M0 включены). Конечные звенья цепи: шпиндель – поперечный суппорт; конечные перемещения: 1 об.шп. → Sпоп.
Уравнение баланса (блок Б5 в правом положении)
где t хв – шаг ходового винта поперечной подачи (t хв = 5 мм); Sпоп – поперечная подача, мм/об.

