 2015-02-14
2015-02-14 435
435Стан системы Краузе существенно отличается от станов, рассмотренных выше, по характеру процесса деформации, конструкции рабочей клети и особенностям устройства рабочей линии стана.
В стане Краузе имеется подвижная станина, которая приводит во вращение валки, накатывающиеся на полосу благодаря трению их о внутренние плоскости станины. Прежде чем перейти к разбору взаимодействия сил в этом стане рассмотрим несколько случаев распределения сил при равномерно катящихся под действием внешних усилий тяжелых цилиндров.
Если цилиндр катится без скольжения (1-й случай) и нормальное давление равно N (фиг. 105, а), то для обеспечения вращения цилиндра необходимо преодолеть действие пары сил, момент которой
 (150)
(150)
где  —коэффициент трения качения, измеряемый в сантиметрах.
—коэффициент трения качения, измеряемый в сантиметрах.
Условие равновесия сил для этого случая представляется уравнением:
 (151)
(151)
где  — алгебраическая сумма моментов, действующих на цилиндр;
— алгебраическая сумма моментов, действующих на цилиндр;
 — приводная сила;
— приводная сила;
 —диаметр цилиндра.
—диаметр цилиндра.
Из уравнения (151) определяем:
 (152)
(152)
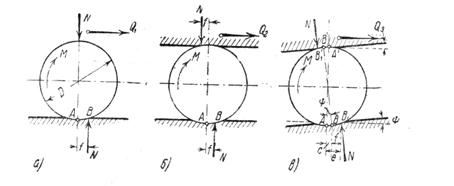
Фиг. 105. Распределение сил при качении тяжелых цилиндров: а — по одной плоскости; б — между двумя параллельными плоскостями; в — между параллельными плоскостями, наклоненными к горизонтали под углом 
В случае нагрузки, показанной на фиг. 105,б (2-й случай), величина момента М  определяется из уравнения:
определяется из уравнения:

а приводная сила
 (153)
(153)
При наклонных плоскостях (3-й случай) условия (фиг. 105, в) по сравнению с первыми двумя случаями изменяются и точка приложения силы N перемещается из В в В  на расстоянии ВВ . От вертикальной плоскости, проходящей через центр цилиндра, точка В отстоит на расстоянии АВ = е, где
на расстоянии ВВ . От вертикальной плоскости, проходящей через центр цилиндра, точка В отстоит на расстоянии АВ = е, где
е = с + f. Таким образом при направляющих плоскостях, имеющих наклон к горизонтали под углом  направление силы N перпендикулярно к этим плоскостям и проходит также под углом , но уже к вертикали, а величина момента М
направление силы N перпендикулярно к этим плоскостям и проходит также под углом , но уже к вертикали, а величина момента М  и силы
и силы  определяется из уравнения:
определяется из уравнения:

отсюда приводная сила:
 (154)
(154)
Сравнивая уравнения (152), (153) и (154), приходим к выводу, что во всех трех случаях приводная сила  имеет разную величину несмотря на то, что прилагается одинаковое давление N. Во втором случае она вдвое больше, чем в первом, в третьем — больше, чем во тором на величину, определяемую наклоном плоскостей, вызывающим увеличение плеча пары сил или изменение угла наклона.
имеет разную величину несмотря на то, что прилагается одинаковое давление N. Во втором случае она вдвое больше, чем в первом, в третьем — больше, чем во тором на величину, определяемую наклоном плоскостей, вызывающим увеличение плеча пары сил или изменение угла наклона.
Однако и третий из разобранных случаев не дает полной аналоги со случаем распределения сил на валках стана Краузе, а дает лишь некоторое приближение к нему.
Рассматривая взаимодействие сил между полосой и валками, заключенными в станину клети с направляющими наклонными плоскостями (фиг. 106), представим себе верхний валок в виде цилиндра,
равномерно катящегося под действием силы  приложенной в точке В'. Накатываясь на полосу валки (цилиндры), защемленные между наклонными плоскостями, деформируют полосу, имеющую конусообразное сечение в направлении прокатки.
приложенной в точке В'. Накатываясь на полосу валки (цилиндры), защемленные между наклонными плоскостями, деформируют полосу, имеющую конусообразное сечение в направлении прокатки.
Наличие сопротивления трения качения в наклонных плоскостях станины вызывает перемещение точки приложение равнодействующей элементарных давлений R, направленной по радиусу ОС из С в С ,на величину плеча 2 (фиг. 106).
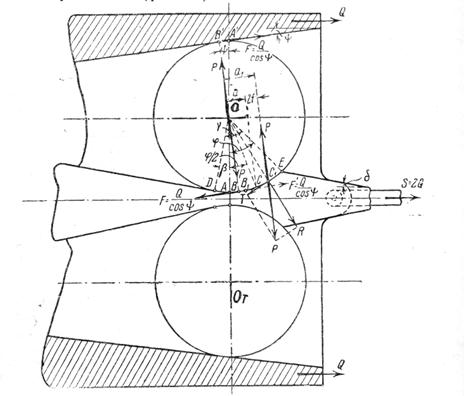
Фиг. 106. Схема взаимодействия сил в стане системы Краузе
В свою очередь давление валка на металл вызывает силы трения, равнодействующая которых Т проходит по касательной к валку в направлении его движения.
Равнодействующая общего давления Р валка на металл определяется из слагающих  и Т. Она располагается параллельно плоскости, перпендикулярной к наклонным плоскостям станины и проходящей через ось валка.
и Т. Она располагается параллельно плоскости, перпендикулярной к наклонным плоскостям станины и проходящей через ось валка.
Таким образом на валок действует система сил, препятствующих его перемещению. К ним необходимо отнести: силы сопротивления трения качения валка в наклонных плоскостях (принимая при этом полосу за вторую плоскость) и силы сопротивления, вызываемые деформацией полосы. Все эти силы можно свести к паре сил, равных по величине равнодействующей Р с плечом
 (155)
(155)
где а — плечо равнодействующей сил, вызываемых деформацией полосы и равное половине проекции дуги захвата

 — плечо сил сопротивления трения качения.
— плечо сил сопротивления трения качения.
Отсюда момент сил, сопротивляющихся перемещению валка, в том числе сил сопротивления трения качения и сил, вызываемых деформацией:
 (156)
(156)
Момент сопротивления перемещению валков (156) может преодолеваться моментом приводной силы , приложенной к точке В с плечом, равным диаметру валка , взятым относительно оси В'. Действие сил этого момента (приводного) можно свести также к паре сил, если к точке В приложить в одном направлении фиктивную силу  (показана пунктиром), сопротивляющуюся перемещению валка и равную и противоположную по направлению силе
(показана пунктиром), сопротивляющуюся перемещению валка и равную и противоположную по направлению силе  ,приложенной в точке В для ее уравновешивания.
,приложенной в точке В для ее уравновешивания.
На основании сказанного, определив приводной момент, можно составить уравнение для суммы моментов, действующих на систему:
 (157)
(157)
откуда

а сила, приложенная к станине для преодоления сопротивления деформации, вызываемой верхним валком, и сил сопротивления трения качения между плоскостями:
 (158)
(158)
где — угол наклона плоскости станины.
Обозначая силу тяги станины или давления шатуна через  , силу сопротивления трения в шейках валков и направляющих клети через
, силу сопротивления трения в шейках валков и направляющих клети через  можем написать уравнение равновесия сил:
можем написать уравнение равновесия сил:
 (159)
(159)
Из уравнения (159) видно, что сила тяги равна сумме проекций слагающих равнодействующей общего давления  , и сумме сил
, и сумме сил  , где
, где  —сопротивление трения в обойме валков,
—сопротивление трения в обойме валков,  —сопротивление в направляющих станины. В свою очередь
—сопротивление в направляющих станины. В свою очередь  , где
, где  — коэффициент трения в обойме на шейках валков с роликовыми подшипниками,
— коэффициент трения в обойме на шейках валков с роликовыми подшипниками,

где  — вес станины,
— вес станины,
 — коэффициент трения скольжения на направляющих станины.
— коэффициент трения скольжения на направляющих станины.
Коэффициенты трения качения в условиях практики можно принимать равными: для роликовых подшипников =0,0015  0,0035, для стальных направляющих и стальных валков в среднем = 0,05 0,15.
0,0035, для стальных направляющих и стальных валков в среднем = 0,05 0,15.
Из уравнений (158) и (159) сила тяги (без учета сопротивления рейке) определяется в зависимости от общего давления Р и величины плеча  :
:
 (160)
(160)
Введя вместо его значение из формулы (158), получаем:
 (161)
(161)
Величину плеча а равнодействующей общего давления металла на валки Р для учета наклона плоскости и сопротивления трения можем определить по формуле (93):
где  —угол конусности полосы.
—угол конусности полосы.
Но так как точка приложения равнодействующей общего давления переместилась из С в С , то плечо фактически увеличилось на величину , что обусловлено наличием трения сопротивления в плоскостях станины (для одного валка — между плоскостью станины и прокатываемым материалом) и действительную величину плеча можно выразить так:
 (162)
(162)
Угол примерно равен 14—15°.
Коэффициент трения между стальными направляющими и стальным валком принимаем  =0,1 см.
=0,1 см.
Угол наклона плоскостей =4—5°.
Радиус валка  = 125 мм.
= 125 мм.
Тогда уравнение (162) принимает следующее числовое выражение:

При этом нужно учесть еще поворот равнодействующей на угол , равный углу наклона направляющих — 3—6°;  3° соответствует длине плеча, равной около 6 мм. Этот поворот оказывает влияние не на величину плеча, а на перемещение точки приложения равнодействующей (при
3° соответствует длине плеча, равной около 6 мм. Этот поворот оказывает влияние не на величину плеча, а на перемещение точки приложения равнодействующей (при  равнодействующая Р занимает вертикальное положение); эта точка удаляется от линии центров валка примерно на:
равнодействующая Р занимает вертикальное положение); эта точка удаляется от линии центров валка примерно на:

длины дуги захвата.
На основании уравнения (161) с учетом потерь в шатуне, кривошипе и других частях привода стана (величина потерь определяется коэффициентом  ) можно найти усилие на кривошипе
) можно найти усилие на кривошипе

Задавшись радиусом кривошипа , определяем вращающий момент привода кривошипа

При обеспечении условий для осуществления процесса прокатки на стане необходимо, чтобы
 (163)
(163)
Задавшись радиусом и зная —значение коэффициента полезного действия стана, можно легко определить приводной момент, а также мощность на приводном валу.
Принимая во внимание потери на приводном валу и в муфте  , можно определить мощность мотора стана, если мотор одновременно не обслуживает другие вспомогательные операции.
, можно определить мощность мотора стана, если мотор одновременно не обслуживает другие вспомогательные операции.








