 2015-02-14
2015-02-14 4927
4927Классическая схема регулирования напряжения генератора (отрицательная обратная связь единичная) показана на рисунке 10.1.
3 tRfUbol9FFJ3/cLUvkSrPmiAdVSfORSRWtHmOxD58Ub3XN21/lrl+H8AAAD//wMAUEsDBBQABgAI AAAAIQAqjVfQ2gAAAAUBAAAPAAAAZHJzL2Rvd25yZXYueG1sTI/BTsMwEETvSPyDtUjcqBMDBUKc qgJVrcSpgQ9w4yWJsNdRvG3Sv8dwgctIq1nNvClXs3fihGPsA2nIFxkIpCbYnloNH++bm0cQkQ1Z 4wKhhjNGWFWXF6UpbJhoj6eaW5FCKBZGQ8c8FFLGpkNv4iIMSMn7DKM3nM6xlXY0Uwr3TqosW0pv ekoNnRnwpcPmqz76VLK9e615Oyzd/m13v1bs82mntL6+mtfPIBhn/nuGH/yEDlViOoQj2SichjSE fzV5D9ntE4iDBqVyBbIq5X/66hsAAP//AwBQSwECLQAUAAYACAAAACEAtoM4kv4AAADhAQAAEwAA AAAAAAAAAAAAAAAAAAAAW0NvbnRlbnRfVHlwZXNdLnhtbFBLAQItABQABgAIAAAAIQA4/SH/1gAA AJQBAAALAAAAAAAAAAAAAAAAAC8BAABfcmVscy8ucmVsc1BLAQItABQABgAIAAAAIQADQSDtEwYA APUiAAAOAAAAAAAAAAAAAAAAAC4CAABkcnMvZTJvRG9jLnhtbFBLAQItABQABgAIAAAAIQAqjVfQ 2gAAAAUBAAAPAAAAAAAAAAAAAAAAAG0IAABkcnMvZG93bnJldi54bWxQSwUGAAAAAAQABADzAAAA dAkAAAAA ">
| Регулятор |
| Объект управления |
Рисунок 10.1 – Схема с отрицательной обратной связью
Назначение регулятора напряжения заключается в коррекции динамических и статических параметров (выходного напряжения) объекта управления (генератора) с помощью управляющего сигнала  так, чтобы реальный выходной сигнал
так, чтобы реальный выходной сигнал  как можно меньше отличался от желаемого выходного сигнала
как можно меньше отличался от желаемого выходного сигнала  . Регулятор вырабатывает управление, используя ошибку регулирования
. Регулятор вырабатывает управление, используя ошибку регулирования  .
.
Основное уравнение ПИД - регулятора имеет следующий вид:
 (1)
(1)
где  ,
,  ,
,  – константы, выбираемые в процессе проектирования. С их помощью удается обеспечить соизмеримость отдельных слагаемых формулы (1).
– константы, выбираемые в процессе проектирования. С их помощью удается обеспечить соизмеримость отдельных слагаемых формулы (1).
Дифференциальная составляющая  в выражении (1) позволяет повысить быстродействие регулятора, предсказывая будущее поведение процесса регулирования.
в выражении (1) позволяет повысить быстродействие регулятора, предсказывая будущее поведение процесса регулирования.
Интегральная составляющая  в формуле (1) призвана ликвидировать статические ошибки управления, поскольку интеграл даже от малой ошибки может быть значительной величиной, вызывающей реакцию регулятора.
в формуле (1) призвана ликвидировать статические ошибки управления, поскольку интеграл даже от малой ошибки может быть значительной величиной, вызывающей реакцию регулятора.
На практике часто используются упрощенные версии ПИД - регулятора: П-, И-, ПД- и ПИ- регуляторы, описываемые соответственно формулами:
 ; (2)
; (2)
 ; (3)
; (3)
 ; (4)
; (4)
 . (5)
. (5)
Для исследования эффективности ПИД - регуляторов необходимо:
собрать модель системы регулирования напряжения в пакете SIMULINK & MATLAB;
сформировать требования к желаемому переходному процессу в системе;
определить значения коэффициентов ПИД - регулятора, используя методику Зиглера-Николса, получить переходную функцию и оценить качество переходного процесса.
Далее, с помощью пакета Signal Constraint выполнить оптимизацию параметров ПИД - регулятора, построить переходную функцию и оценить качество переходного процесса.
Схема обобщенной системы регулирования напряжения генератора в программе MATLAB показана на рисунке 10.2.
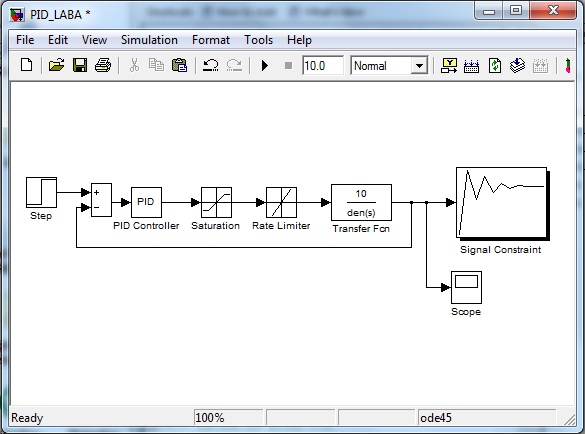
Рисунок 10.2 – Окно Simulink собранной схемы
Данная схема включает в себя:
–PID Controller – блок для задания коэффициентов П-, ПИ-, ПД- и ПИД-регуляторов (Simulink Extras/Additional Linear/PID Controller);
– Saturation – блок, ограничивающий уровень входного сигнала (Simulink/Commonly Used Block/Saturation);
– Rate Limiter – блок, ограничивающий значение производной входного сигнала (Simulink/Discontinuities/Rate Limiter);
– Transfer Fcn – блок для задания передаточной функции предложенных в Приложении Л (таблица Л.1) объекта управления (Simulink/Continuous/Transfer Fcn);
– Step – блок для задания входного ступенчатого сигнала (Simulink/Sources/Step)
– Sum – Сумматор (Simulink/Commonly Used Block/Sum);
– Scope – виртуальный осциллограф (Simulink/Skins/Scope);
– Signal Constraint – блок для оптимизации параметром регулятора и задания желаемого переходного процесса (Simulink Response Optimization/Signal Constraint).
Выбор оптимальных коэффициентов ПИД–регуляторов осуществляется по методике Зиглера-Николса, которая предполагает следующие шаги:
1. Коэффициенты  и
и  устанавливаются равными нулю, а коэффициент
устанавливаются равными нулю, а коэффициент  увеличивается до тех пор, пока система не потеряет устойчивость.
увеличивается до тех пор, пока система не потеряет устойчивость.
2. Предельное значение  обозначается как
обозначается как  , а период автоколебаний как
, а период автоколебаний как  .
.
3. Значения коэффициентов ПИД–регулятора рассчитываются по следующим формулам:
 ;
;  ;
;  .
.
Пример. Дан объект управления, передаточная функция которого имеет вид:
W (s) =  .
.
Необходимо, используя методику Зиглера-Николса, вручную рассчитать коэффициенты ПИД-регулятора для данного объекта управления.
Решение:
Двойным щелчком мыши входим в PID регулятор (блок PID Controller, описание блока приведено ниже); коэффициенты ki и kd устанавливаем равными нулю, а коэффициент k р изменяем от 0 и до величины, при которой система потеряет устойчивость. При этом для каждого значения коэффициента k р запускаем моделирование (кнопка Play) и смотрим результат на осциллографе (для данного объекта управления система теряет устойчивость при значении k р =0,82). Принимаем, что  =
=  и из графика находим величину
и из графика находим величину  секунды (период колебаний). Следовательно, можем найти коэффициенты ПИД-регулятора по данной методике:
секунды (период колебаний). Следовательно, можем найти коэффициенты ПИД-регулятора по данной методике:
 ;
;
 ;
;
 .
.
Подставляем данные коэффициенты в блок PID Controller и получаем переходный процесс.
В наборе блоков раздела библиотеки Simulink Response Optimization имеется основной блок Signal Constraint, с помощью которого можно задать требуемые ограничения для переходного процесса в оптимизируемой системе, указать оптимизируемые параметры и выполнить параметрическую оптимизацию (описание блоков системы управления на рисунке 2).
Перед началом работы надо в главном окне Command Window задать следующие значения:
kp=1;
ki=1;
kd=1.
Блок PID Controller представляет собой описание ПИД- регулятора. Также можно представить данный блок в виде П-, ПИ- и ПД- регулятора (рисунок 10.3).
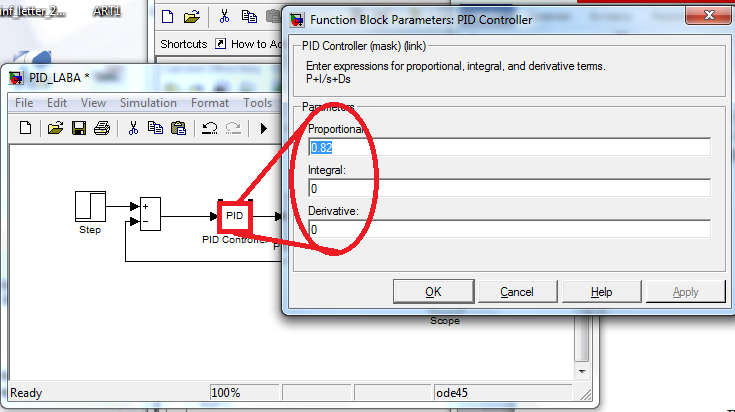
Рисунок 10.3 – ПИД-регулятор и окно задания параметров регулятора
Объект регулирования (рисунок 10.4) представлен в виде трех последовательно соединенных блоков. Сам объект задан передаточной функцией (блок Transfer Fcn), перед которой помещены нелинейности, ограничивающие уровень входного сигнала (блок Saturation) и значение его производной (блок Rate Limiter).
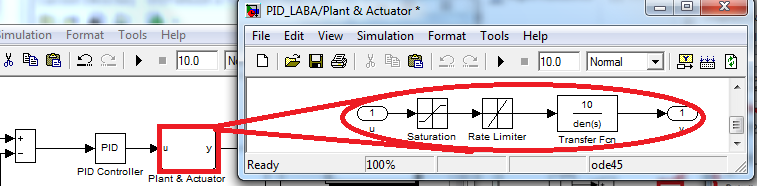
Рисунок 10.4 – Описание объекта управления
На выходе объекта (см. рисунок 10.2) располагается блок оптимизации Signal Constraint, окно которого показано на рисунке 10.5.
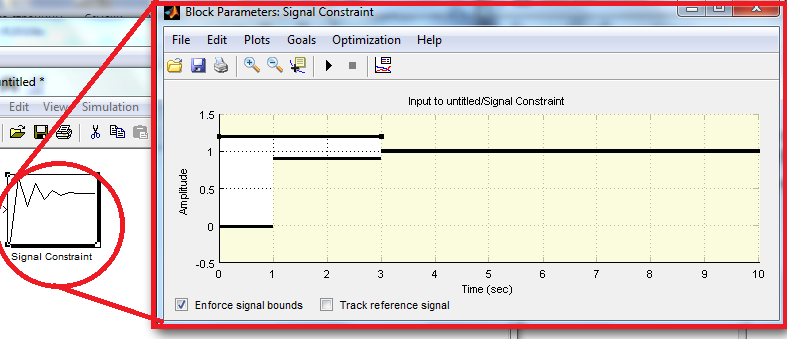
Рисунок 10.5 – Блок оптимизации Signal Constraint
Особенности использования блока Signal Constraint.
Для запуска блока необходимо ввести соответствующие значения коэффициентов kp, ki и kd в соответствующие разделы PID Controller как показано на рисунке 10.6 (буквы ki, kd, kp и в начальном окне и в самом блоке должны быть одинаковыми и все маленькими):
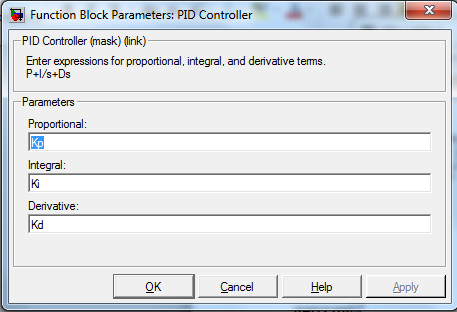
Рисунок 10.6 – Окно задания параметров PID Controller
Для открытия окна ограничений дважды щелкните мышью по блоку Signal Constraint.
Окно ограничений (см. рисунок 10.5) содержит оси отклика (Amplitude) и времени (Time); панель меню (вверху окна); панель управления (внизу окна); верхнюю и нижнюю ограничительные линии (заданные по умолчанию). Окно ограничений имеет заданные по умолчанию размеры и положение. Их можно изменять при помощи мыши.
Верхняя и нижняя ограничительные линии (рисунок 10.7) в окне ограничений задают пределы области, в которую должен попасть сигнал отклика системы управления. По умолчанию эта область задает время нарастания 5 секунд и время регулирования 15 секунд. Эти границы необходимо изменить, чтобы они соответствовали указанным ранее значениям (желаемым). Для задания положения ограничительной линии времени нарастания установите указатель мыши на горизонтальную ограничительную линию, соответствующую 5 секундам. Нажмите и, удерживая нажатой правую кнопку мыши, тащите ее. При необходимости более точной установки линий можно включить сетку, выбрав опцию Grid щелчком правой кнопки мыши в поле ограничения (рисунок 10.8).
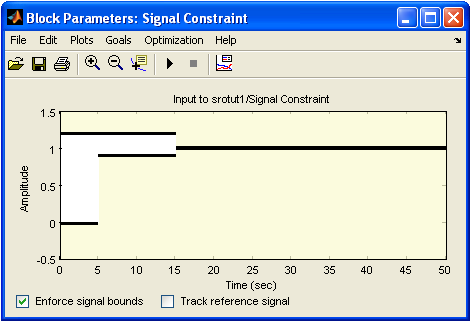
Рисунок 10.7 – Поле ограничения
Указатель мыши изменится и примет форму сжатой ладони. В этом режиме можно менять границу (по времени) между двумя уровнями ограничительной линии снизу. Перетащите вертикальную линию на отметку, например, 10 секунд и отпустите мышь (рисунок 10.8).
Рисунок 10.8 – Изменение границы по времени
Для более точной установки линий следует использовать диалог Edit Design Requirement, который появляется при двойном щелчке левой кнопкой мыши по нужному сегменту ограничительной (горизонтальной) линии (рисунок 10.9).
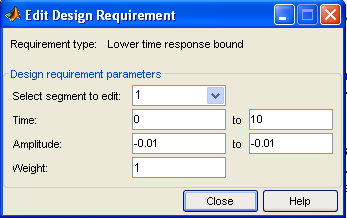
Рисунок 10.9 – Окно диалога Edit Design Requirement
Для установки верхней ограничительной линии нажмите и удерживайте нажатой левую кнопку мыши где-нибудь на верхней линии. Она изменит свой цвет, а указатель мыши станет четырех направленной стрелкой  . В этом режиме ограничительную линию можно перемещать вертикально и горизонтально. При горизонтальном перемещении линий подобным способом не происходит растягивания линий, они лишь перемещаются, при этом могут образоваться недопустимые пробелы в ограничительной фигуре.
. В этом режиме ограничительную линию можно перемещать вертикально и горизонтально. При горизонтальном перемещении линий подобным способом не происходит растягивания линий, они лишь перемещаются, при этом могут образоваться недопустимые пробелы в ограничительной фигуре.
Не отпуская кнопки мыши, перетащите нижнюю границу верхней ограничительной линии до значения 1.1 по оси Amplitude, как показано на рисунке 10.10.
Рисунок 10.10 – Изменение вертикальных и горизонтальных границ
И, наконец, время регулирования тоже нуждается в изменении. Установите курсор мыши на верхнюю вертикальную линию со значением времени 15 секунд и перетащите ее на значение 30 секунд. Затем повторите эту операцию с нижней вертикальной линией на уровне 15 секунд. Окончательный вид фигуры ограничений должен быть как на рисунке 10.11.
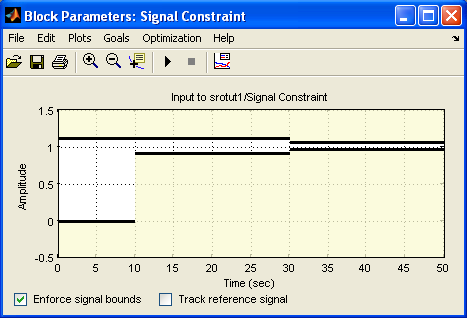
Рисунок 10.11 – Фигура ограничений времени регулирования
При необходимости ограничительные линии можно устанавливать под углом к горизонтали. Для этого необходимо взять мышью конец линии и перемещать его в нужном направлении.
Пример такого перемещения ограничительной линии показан на рисунке 10.12.
Рисунок 10.12 – Изменение положения ограничительных линий
Перед началом оптимизации переходного процесса пакету Simulink Response Optimization необходимо указать, какие величины следует изменять и настраивать. Для этого откройте Tuned Parameters (Настраиваемые параметры) из меню Optimization. Чтобы добавить настраиваемые переменные нужно нажать кнопку Add. Появится окно Add Parameters (Добавление параметров) с параметрами, которые в модели Simulink были объявлены настраиваемыми (см. рисунок 10.13). Данные можно добавлять только после ввода буквенных значений коэффициентов Kp, Ki и Kd в соответствующие поля блока PID Controller.
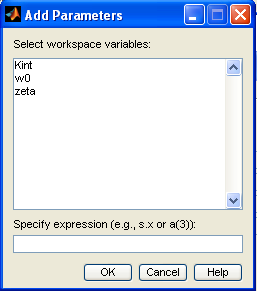
Рисунок 10.13 – Окно добавления параметров
Далее необходимо щелкнуть левой кнопкой мыши по параметру Ki (или нескольким, если это необходимо), затем нажать OK. Параметр будет добавлен (рисунок 10.14).
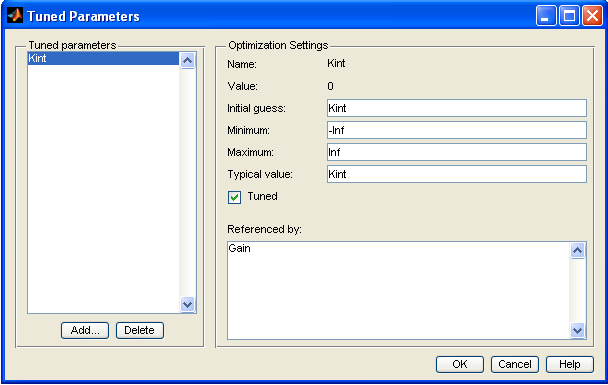
Рисунок 10.14 – Добавление параметра








