 2015-02-15
2015-02-15 481
4814.1. Описание лабораторной установки, назначение оборудования.
Схема лабораторной установки приведена на рис.3. Электромашинный агрегат состоит из испытуемой машины ИМ (асинхронный двигатель с фазным ротором) и нагрузочной машины НМ (вентильный двигатель). Для измерения скорости на валу НМ имеется инкрементный датчик скорости (ДС). Питание обеих машин осуществляется от сети переменного тока 380В через автоматический выключатель АВ1: ИМ – через понижающий трансформатор Т1, а НМ – через приводной преобразователь MOVIDRIVE (MDХ).
Отличительной особенностью механических характеристик асинхронного двигателя является то, что они имеют участок не только с отрицательным наклоном, как у двигателей постоянного тока, но и в отличие от них – участок с положительным наклоном. Снимать механические характеристики на этом участке можно только при выполнении определенных условий. По этой причине управление НМ осуществляется от преобразователя MOVIDRIVE, работающего в режиме регулирования скорости. При этом момент, развиваемый нагрузочной машиной, пропорционален измеряемому току статора I0 : М = км·I0, где: км = 1,52Нм/А.
Напряжение на трансформатор Т1 подается через магнитный пускатель К. Подаваемое напряжение меньше номинального, что позволяет уменьшить мощность нагрузочной машины, необходимую для снятия механических характеристик двигателя вплоть до критического момента. Катушка контактора К подключается к сети 220В через кнопки «Выкл» (красная), «Вкл» (зеленая) и контакт переключателя S2. Переключателем S2 задается схема подключения обмотки статора в зависимости от вида проводимых работ согласно таблице 6:
Таблица 6.
| Номер положения переключателя S2 | Состояние схемы |
| питание статора переменным током | |
| питание статора постоянным током |
В цепи обмоток статора включены амперметр IС и вольтметр UС, по которым производится контроль напряжения и тока статора ИМ.
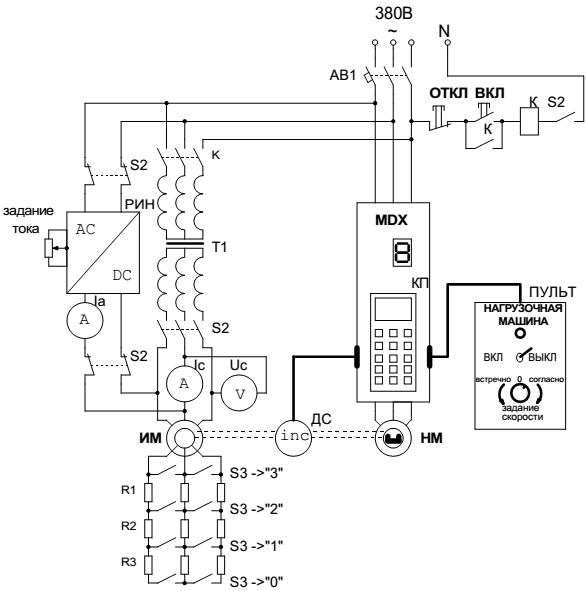
Рис.3. Схема лабораторной установки.
Для снятия искусственных механических характеристик с добавочным сопротивлением RП в цепи ротора используются сопротивления R1, R2, R3, включенные в цепи его обмотки. Заданная величина RП устанавливается переключателем S3, согласно Таблице 2.
Напряжение постоянного тока, которое необходимо подавать в цепь статора при работе ИМ в режиме динамического торможения, поступает от регулируемого источника напряжения (РИН) через контакты S2, если он находится в положении «2». При этом обмотка статора другими контактами S2 одновременно отключается от сети переменного тока. Требуемое значение величины постоянного тока устанавливается потенциометром «задание тока» по амперметру Iа.
Управление приводным преобразователем осуществляется от ПУЛЬТа управления нагрузочной машиной. Для включения преобразователя его нужно разблокировать тумблером на этом пульте – на семисегментном индикаторе преобразователя появится цифра «5», что соответствует режиму работы «регулирование скорости». Величина скорости задается потенциометром «задание скорости». При работе НМ на экране дисплея клавишной панели отображается информация: текущие значения частоты вращения в об/мин (rpm) и тока в А (Amp), а также режим работы – регулирование скорости (SPEED CONTROL).
Рис.4. Индикация на экране дисплея клавишной панели.
4.2. Подготовка к работе. Включением АВ1 подать напряжение 380 В.
Установить переключатель S2 в положение «1», а переключатель S3 в положение «2». Пуск машин выполняется в следующей последовательности.
Первой запускается нагрузочная машина. Для этого преобразователь разблокируется включением тумблера на ПУЛЬТе и вращением в направлении «согласно» ручки потенциометра «задание скорости» устанавливается скорость 900 ÷ 1000 об/мин. Затем нажатием зеленой кнопки на корпусе пускателя К запускается асинхронный двигатель с добавочным сопротивлением RП в цепи ротора.
4.3. Снятие механических характеристик.
Характеристики снимаются при пониженном напряжении статора (160-170)В. Фактическое значение UС фиксируется, т.к. оно потребуется при обработке экспериментальных данных. Ток статора IC измеряется только для контроля.
Первой всегда снимают точку холостого хода, когда ИМ преодолевает механические потери агрегата (МНМ = 0). Для снятия этой точки необходимо установить тумблер включения нагрузочной машины в положение «ВЫКЛ» и провести измерения. Затем необходимо тумблер перевести в положение «ВКЛ» и снять характеристику в двигательном и тормозных режимах, изменяя скорость НМ в диапазоне от +1200 до – 500 об/мин. При выборе интервалов скорости для проведения измерений следует учитывать форму характеристики. В районе критической точки интервалы должны быть меньше. Обязательно нужно снять точку, где ИМ работает на синхронной скорости n = n0 (МНМ = МХХ).
4.3.1. Дляснятия естественной характеристики переключатель S3 нужно
установить в положение «3» (RП = 0). Измеряются и записываются частота вращения n и ток I0 нагрузочной машины.
4.3.2. Дляснятия искусственных характеристик переключатель S3 нужно
устанавливать в положения, соответствующие заданным значениям RП1 и RП2 (см. таблицу 2).
4.3.3. Для перевода двигателя в режим динамического торможения
необходимо переключатель S2 установить в положение «2». При этом обмотки статора отключаются от сети переменного тока и подключаются к регулируемому источнику постоянного напряжения РИН. Потенциометром «задание скорости» установить заданное значение постоянного тока IДТ 1 по амперметру Iа. Переключатель S3 установить в положение, соответствующее заданному значению RП1.
Для каждой характеристики необходимо сначала определить скорость в критической точке. Увеличивая скорость нагрузочной машины, следить за изменением тока нагрузочной машины – он постепенно нарастает соответственно росту момента до критического значения, после чего начинает уменьшаться. Зафиксировать значение скорости в критической точке, чтобы затем снять механические характеристики более точно.
При токе IДТ 1 снять механические характеристики с сопротивлениями RП 1 и RП 2, после чего установить ток IДТ2 и снять характеристику с RП 2.
В этом режиме характеристики симметричны относительно начала координат, поэтому скорость следует изменять только в одном направлении, как показано на рис.2.








