 2015-02-04
2015-02-04 595
595В схеме динамического торможения (рис. 9.8, а) используются контакт КТ тормозного контактора контакт КЛ линейного. Эти контакты всегда находятся в противоположном состоянии: если замкнут контакт КЛ, разомкнут контакт КТ, и наоборот.
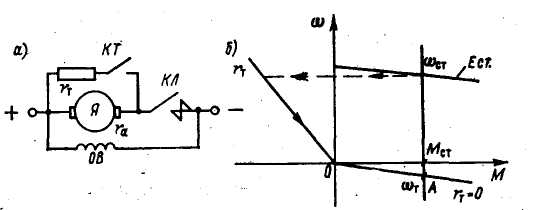
Рис. 9.8. Схема (а) и механические характеристики (б) при динамическом торможении двигателя постоянного тока
До начала торможения, при работе двигателя, контакт КЛ замкнут, контакт КТ разомкнут.
Для торможения размыкают контакт КЛ и замыкают КТ. При на обмотке якоря U = 0.
При замыкании контакта КТ к обмотке якоря двигателя подключается тормозной токоограничивающий резистор r  , причём обмотка якоря и резистор соединены последовательно.
, причём обмотка якоря и резистор соединены последовательно.
Изменение направления тока приводит к изменению знака электромагнитного момента двигателя М = k(- I  )Ф <0, этот момент становится тормозным.
)Ф <0, этот момент становится тормозным.
Особенности торможения:
1. простота торможения, т.к. для его получения нужен тормозной контактор КТ и тормозной резистор;
2. торможение позволяет полностью остановить якорь (т. «0» на рис. 9.8, б);
3. торможение широко применяется в электроприводах грузоподъемных механизмов для предварительного сброса скорости перед срабатыванием основного, электромагнитного тормоза, обеспечивающего полную остановку груза.








