 2015-02-04
2015-02-04 5120
5120В зависимости от изменения скорости электропривода, различают два режима его работы:
1. установившийсяили статическийрежим, при котором скорость не изменяется;
2. переходный или динамический режим, при котором скорость изменяется.
Переходный режим может возникнуть в таких случаях:
1. при изменении параметров двигателя, например, при регулировании скорости изменением сопротивления в цепи обмотки якоря;
2. при изменении параметров механизма, например, при изменении подачи насоса;
3. при изменении параметров судовой сети, например, при колебаниях напряжения.
В динамическом режиме, в дополнение к ранее рассмотренным электромагнитному моменту двигателя М и статическому моменту механизма М  , на валу двигателя возникает дополнительный, так называемый динамический момент М
, на валу двигателя возникает дополнительный, так называемый динамический момент М  .
.
Появление этого момента объясняется действием сил инерции всех без исключения движущихся частей электропривода. Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря электродвигателя, шестерней редуктора, грузового барабана и самого груза.
Динамический момент, возникающий под действием сил инерции, увеличивает время переходных процессов, например, время пуска и остановки электропривода.
Для уменьшения динамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно, для сохранения мощности двигателя, увеличивают его длину. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми (от грузового крана).
3. Механические характеристики электродвигателей
Механическая характеристика электродвигателя - это зависимость угловой скорости ЭД от момента на его валу: ω (М). У большинства ЭД (кроме синхронных) с увеличением нагрузки на валу угловая скорость уменьшается. Характер изменения угловой скорости двигателя с изменением момента сопротивления определяет жесткость механической характеристики. По степени жесткости различают механические характеристики трех видов (рис. 3): абсолютно жесткие, жесткие и мягкие.
Абсолютно жесткие характеристики присущи синхронным двигателям (прямая 1). При изменяющемся моменте в пределах перегрузочной способности угловая скорость этих ЭД не изменяется.
Жесткими характеристиками обладают ЭД постоянного тока параллельного возбуждения (наклонная прямая 2) и асинхронные электродвигатели в пределах рабочей части их характеристик (верхняя часть кривой 3). У этих ЭД при значительном изменении момента скорость изменяется в меньшей степени.
Мягкие характеристики свойственны ЭД постоянного тока последовательного (кривая 4), смешанного возбуждения (кривая 5) и
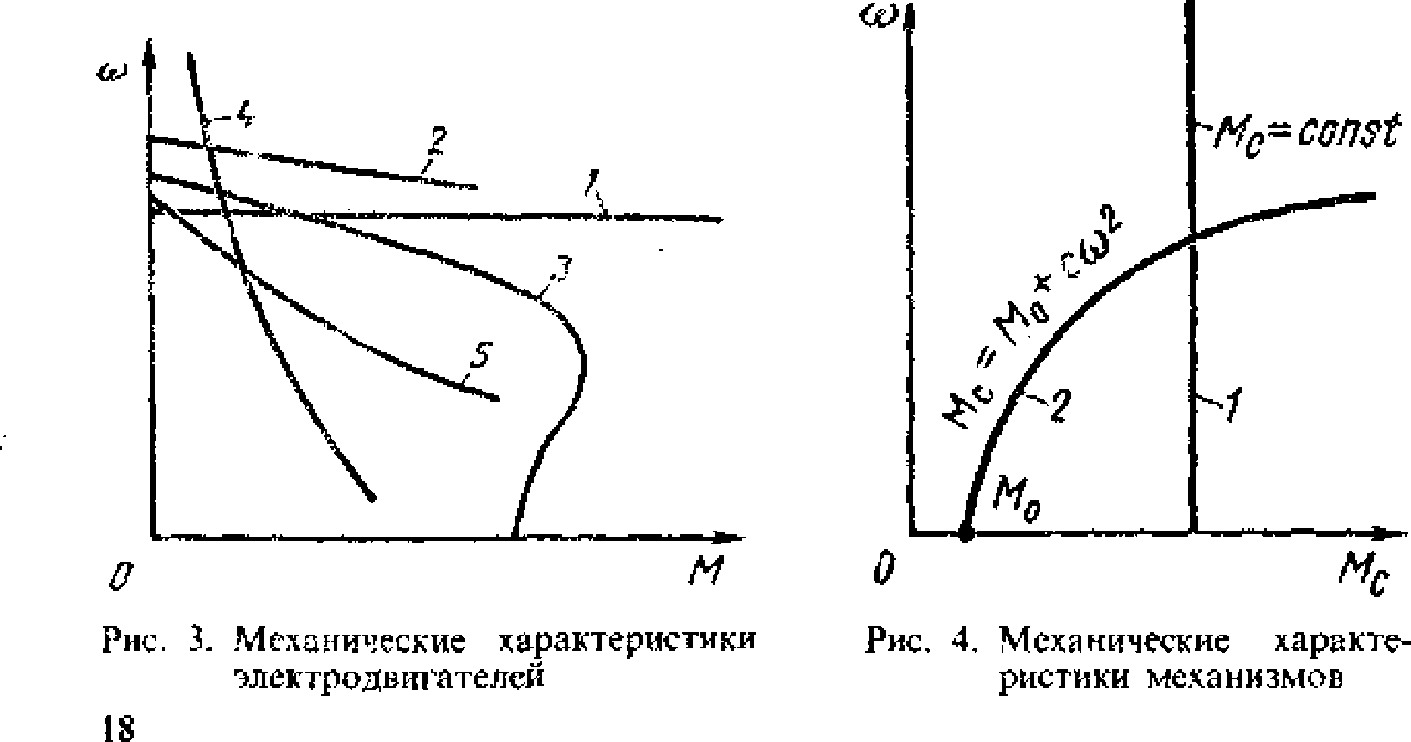
ЭД в системе Г-Д с противокомпаундной обмоткой. Механические характеристики этих ЭД таковы, что при небольшом изменении момента происходит значительное изменение их угловой скорости.
Степень жесткости механической характеристики является одним из основных электромеханических свойств ЭД.
Наряду с механическими характеристиками электромеханические свойства ЭД отражают также электромеханические характеристики, являющиеся одним из видов рабочих характеристик и представляющие собой зависимость угловой скорости ЭД от тока, протекающего по цепи его якоря или ротора: ω(I).
Механические и электромеханические характеристики ЭД разделяют на естественные и искусственные.
Естественной характеристикой называется характеристика, соответствующая работе ЭД при номинальных параметрах питающей сети, нормальной схеме подключения к ней и при отсутствии добавочных сопротивлений в цепях электродвигателя.
Каждому ЭД присуща только одна естественная характеристика.
Искусственные характеристики получаются при питании ЭД от сети с напряжением или частотой, отличающимися от номинальных, или при включении в одну из цепей ЭД добавочного резистора, или если ЭД подключен к источнику тока, по необычной схеме.
Для каждого ЭД можно создать неограниченное количество искусственных характеристик.
Работа на них происходит при пуске, регулировании частоты вращения и торможении ЭД.
4.Механические характеристики механизмов
При рассмотрении работы ЭД, приводящего в движение механизм, необходимо также принимать во внимание механическую характеристику механизма, ибо от степени их соответствия зависят условия эксплуатации двигателя.
Механической характеристикой механизма называется зависимость создаваемого им приведенного статического момента от угловой скорости ЭД: М(ω)
По характеру этой зависимости большинство судовых механизмов можно разделить на две основные группы (рис. 4):
1. Механизмы с не зависящим от угловой скорости статическим моментом (прямая 1). (крановая характеристика).
К этой группе механизмов относятся грузоподьемные лебедки, краны, лифты, поршневые насосы и компрессоры(рис 4).
2. Механизмы, у которых статический момент зависит от квадрата угловой скорости;
Механическая характеристика этих механизмов изображается в виде параболической кривой 2, не проходящей через начало координат. Их начальный статический момент обозначается через М0 и обусловлен трением в подшипниках и другими потерями.
К механизмам, обладающим такой характеристикой, называемой вентиляторной, относятся вентиляторы, центробежные насосы и гребные винты.
Сравнивая механические характеристики, нетрудно увидеть, что для механизмов с характеристикой 1 необходимы ЭД, способные
| Рис, 5, Совмешенные механические характеристики механизмов и электродвигателя |
развивать большой пусковой момент, а для механизмов с характеристикой 2 приводные ЭД могут развивать меньший момент.
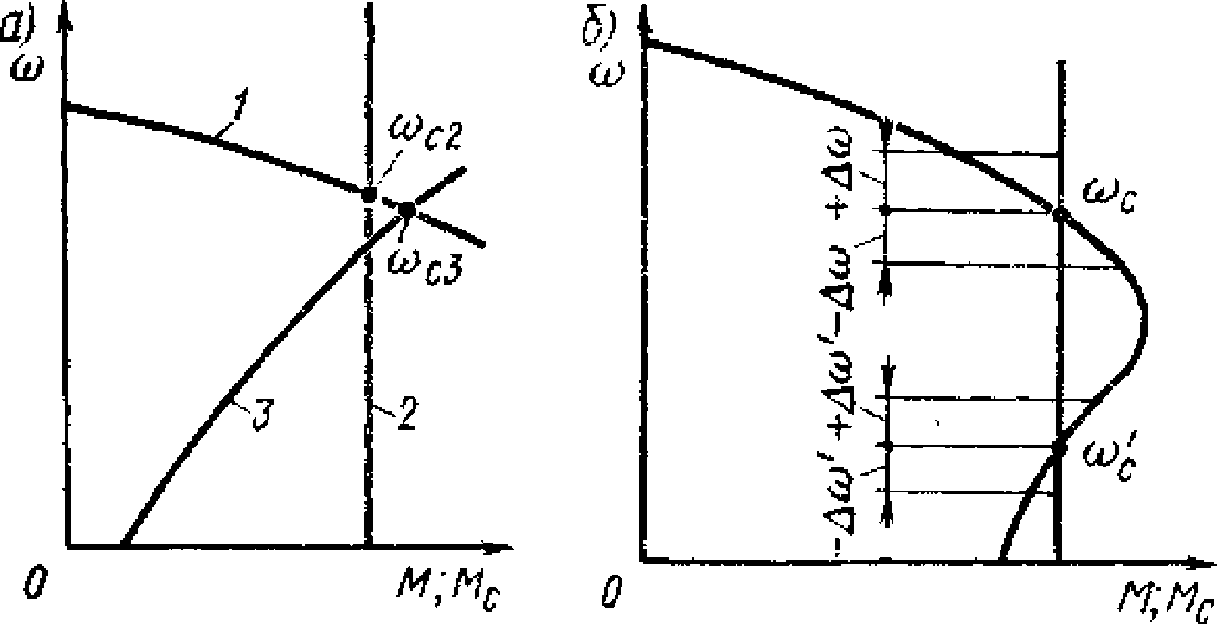
Располагая механическими характеристиками ЭД и механизма, легко найти значение угловой скорости ЭД при установившемся режиме работы привода. Поскольку в этом режиме система привода находится в состоянии равновесия, т.е. М = Мс, очевидно, что установившаяся скорость будет определяться точкой пересечения механических характеристик. Например, для характеристики I двигателя (рис. 5. а) и характеристик 2 и 3 механизмов установившимися скоростями будут ωс2 и ωс3 Если же механические характеристики ЭД и механизма не пересекаются, то установившийся режим работы привода в таком случае невозможен. Следует иметь в виду, что не в любой точке пересечения характеристик работа ЭП может быть устойчивой. Например, на рис. 5,б механические характеристики ЭД и механизма пересекаются в точках установившегося режима ωс и (ωсштрих). Однако точка (ωсштрих) соответствует неустойчивому установившемуся режиму. Положительный динамический момент при уменьшении скорости и отрицательный при ее возрастании обеспечит возврат системы привода в точку ωс.
Таким образом, вид механических характеристик ЭД и механизма существенно влияет на характер переходных процессов, и это необходимо принимать во внимание при эксплуатации ЭП.
3. Способы пуска, регулирования частоты вращения и торможения электроприводов постоянного тока.

