 2015-02-04
2015-02-04 1526
1526К основным деталям устройства относятся (рис. 10.34):
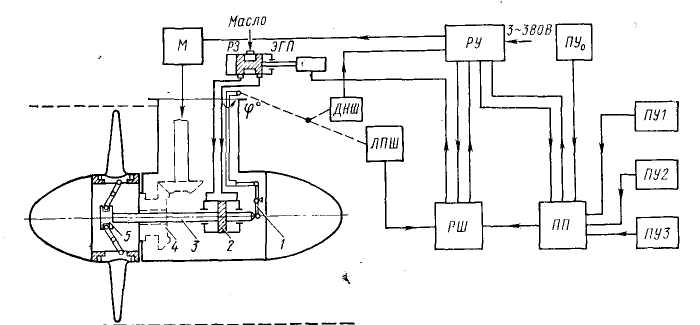
Рис. 10.34. Функциональная схема электропривода подруливающего устройства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота лопастей винта в пропорциональное напряжение;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель, контакты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство (щит электропитания);
РШ – регулятор шага винта, для выработки напряжения,;
ЭГП – электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору 5;
4 – коническая зубчатая передача, для передачи вращающего момента электродвигателя на ступицу винта (т.е. для вращения винта);
5 – кондуктор, устройство для непосредственного разворота лопастей винта.








