 2015-03-20
2015-03-20 809
809Передача считается работоспособной, если выполняются условия:
1) контактная выносливость поверхностей зубьев,
s H £ [s H ];
2) изгибная выносливость зубьев шестерни,
s F 1 £ [s F ]1;
3) изгибная выносливость зубьев колеса,
s F 2 £ [s F ]2.
1.8.7. Контактные напряжения в зацеплении конических
прямозубых зубчатых колес
Контактные напряжения вычисляются по формуле
Для передачи со стальными колесами
Формула аналогична приведенной в разделе 1.8.4, в котором описаны входящие в нее основные параметры. Особенности расчета заключаются в следующем:
– n H = n F – коэффициент уменьшения нагрузочной способности конической передачи по сравнению с эквивалентной цилиндрической. Принимают n H = n F = 0,85;
– dm 1 – средний диаметр шестерни, подсчитываемый по формуле
dm 1 = mnm ∙ z 1 = de 1 – bw ∙sind1;
– a w – угол зацепления, обычно a w = 20°.
Коэффициент нагрузки KH принимают как результат расчета по формуле
KH = KH b∙ KHV,
где KH b – коэффициент, учитывающий распределение нагрузки по ширине зубчатого венца. В упрощенных расчетах может быть найден в зависимости от параметра Kbe ∙ u / (2 – Kbe) по графикам рис. П2.4. Параметр Kbe можно найти по формуле
KHV – коэффициент, учитывающий динамическую нагрузку в зацеплении. Определяется так же, как и для цилиндрических передач, менее точных на одну степень, см. раздел 1.8.4.
1.8.8. Напряжения изгиба в основании зубьев шестерни и
колеса конической зубчатой передачи
Напряжения в зубьях шестерни и колеса:
В этой формуле
Ft 1 = Ft 1(Б) – найдена в разделе 1.7.3.4;
KF – коэффициент нагрузки, определяемый по формуле KF = KF b∙ KFV, здесь KF b= KH b, KFV = KHV, см. раздел 1.8.7.
n H = n F = 0,85;
mnm – средний модуль,
mnm = mte ∙(1 – 0,5∙ Kbe).
Коэффициент формы зуба может быть найден по диаграмме (рис. П2.2) следующим образом:
– определяются условные числа зубьев:
– для шестерни zv 1 = z 1/cosd1;
– для колеса zv 2 = z 2/cosd2.
Далее, по диаграмме находим YFS 1 и YFS 2.
1.8.9. Условия работоспособности конической передачи
редуктора
Заключение о работоспособности конической передачи соответствует изложенному в разделе 1.8.6.
2. Второй этап эскизного курсового
проекта. Расчеты подшипников
качения редуктора
Для выполнения расчетов подшипников качения используется информация из разделов 1.4, 1.6 и 1.7.
2.1. Определение ресурса подшипников
промежуточного вала редуктора
Расчетная схема промежуточного вала рассматривается на примере редуктора по схеме 21 с быстроходной шевронной зубчатой передачей в двух взаимно перпендикулярных плоскостях – плоскости XY и XZ и представлена на рис. 2.1.
Для определения пяти опорных реакций в опорах 3 и 4 (соответственно, опоры быстроходного вала обозначены 1 и 2, а опоры тихоходного 5 и 6) используются уравнения статики. Координаты e и c найдены по рис. 1.9…1.14 раздела 1.4.
Нагрузки на подшипники определяются геометрическим суммированием опорных реакций по формулам:
– опора 3 – плавающая нагружена радиальной нагрузкой
 , Н;
, Н;
– опора 4 – фиксированная нагружена радиальной и осевой нагрузками
 , Н;
, Н;
Fa = R 4 X.
Заметим, что при изменении знака вращающего момента направление силы Fa 1(Т) меняется на противоположное и ситуация меняется.
Аналогичный подход используется для определения нагрузок на подшипники промежуточных валов редукторов всех других схем.
На рис 2.2 показана расчетная схема редуктора по схеме 22 с шевронной тихоходной передачей и косозубой быстроходной.
Развернутая схема, наиболее простая и распространенная, в сборнике заданий имеет номер 20. В таких редукторах используются две цилиндрические зубчатые передачи, обычно косозубые. Нагрузки на подшипники можно определить соответственно рис. 2.3.
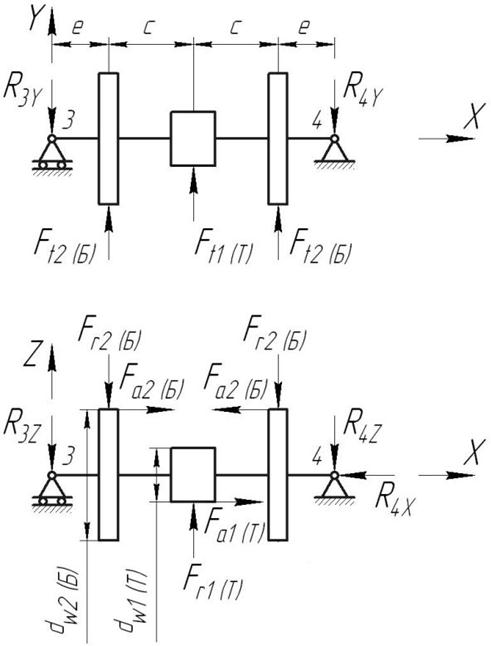
Рис. 2.1
Наименее благоприятное сочетание направлений нагрузок от усилий в зацеплении характеризуется воздействием осевой силы Fa 1( T ) на опору 4 – определяющую долговечность опорного узла вала в целом. Заметим, что изменение знака момента меняет направления окружных сил Ft и осевых Fa на противоположное.
Редукторы по схеме 24 выполнены по сосной схеме – быстроходный и тихоходный валы имеют общую геометрическую ось вращения. Рисунок 2.4 показывает наименее благоприятный случай – осевая нагрузка шестерни тихоходной передачи Fa 1( T ) направлена на опору 4, для которой суммарная радиальная нагрузка Fr 4, обычно, чем в опоре 3. Можно предположить, что ресурс подшипника в этой опоре определяет ресурс опор промежуточного вала в целом.
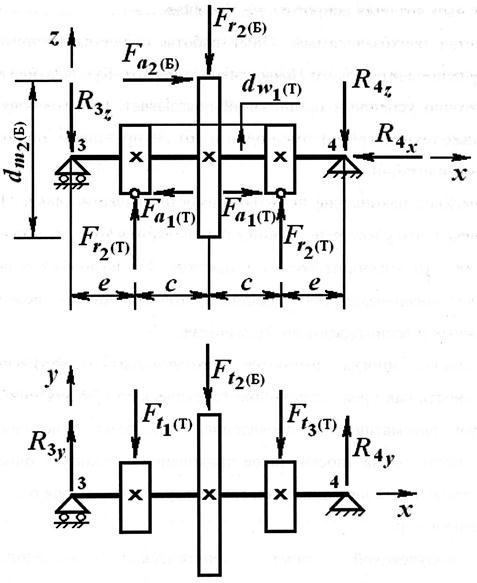
Рис. 2.2
Расчетная схема редуктора схема 23 с быстроходной конической прямозубой и цилиндрической косозубой тихоходной передачами представлена на рис. 2.5.
Показанное направление нагрузок от усилий в зацеплениях конической и цилиндрической передач соответствует наименее благоприятному случаю. Изменение знака вращающего момент меняет направления окружных сил Ft 1( T ) и Ft2 (Б) на противоположные, но направление Fa 2(Б) остается прежним, также, как направления сил Fr 1( T ) и Fr2 (Б).
Диаметр d П цапфы вала найден ранее (см. п. 1.4), это дает возможность предварительно подобрать подшипники для рассматриваемых опор. Начинают подбор с подшипников шариковых однорядных легкой серии.
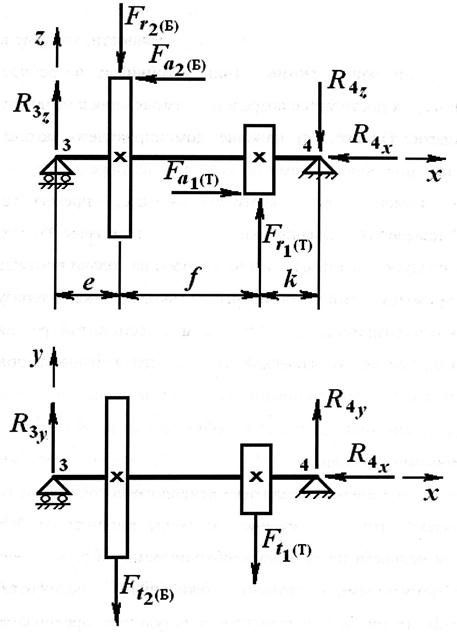
Рис. 2.3
Пример. d П = 25 мм, что соответствует подшипнику № 205, с размерами D = 52 мм, d = 25 мм, b П = 15 мм, динамическая грузоподъемность С = 14000 Н, статическая грузоподъемность С 0 = 6950 Н.
Ресурс подшипника Lh определяется из равенства:
 , час,
, час,
где a 1, a 2 – коэффициенты, учитывающие свойства материалов колец и тел качения и вероятность безотказной работы, определяемые по табл. 16.3 [2]. В проектных расчетах можно принимать a 1 × a 2 = 1; a – показатель степени кривой усталости. Для шариковых подшипников a = 3, для роликовых a = 3,33; n – частота вращения, в нашем случае n = n 2Б = n 1Т; P – эквивалентная нагрузка, определяемая уравнением:
Pr = (X × V × Fr + Y × Fa) × K д × Kt,
решаемым с привлечением таблиц из каталогов и справочников (например, табл. П3.6).
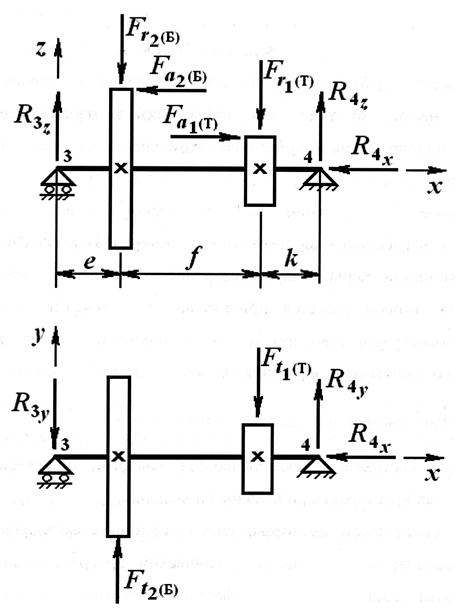
Рис. 2.4
Порядок определения P следующий. Вначале определяется (выбирается) тип подшипника, например, радиальный шариковый однорядный и вычисляется отношение Fa / C 0, и находится значение параметра осевого нагружения e. Затем, вычисляется величина Fa / (V × Fr), которая сравнивается с параметром e. При этом возможны два варианта:
1, Fa / (V × Fr) £ e;
2, Fa / (V × Fr) > e.
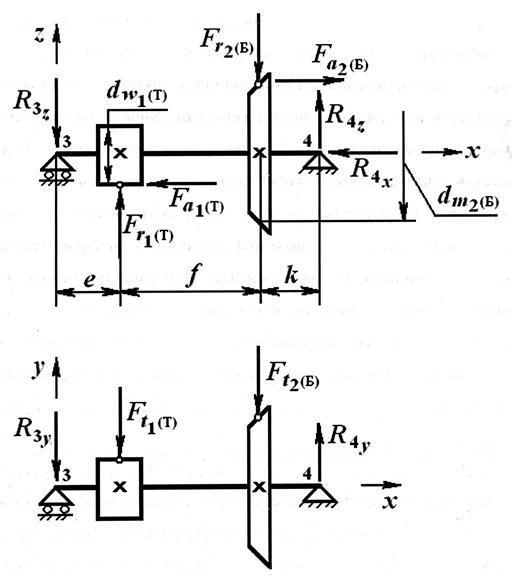
Рис. 2.5
Каждому из этих вариантов соответствуют определенные значения коэффициента радиальной – X и осевой – Y нагрузок.
Коэффициент V в формуле зависит от вида нагружения его колец. В нашем случае внутреннее кольцо подшипника вращается вместе с валом, а наружное – неподвижно, поэтому V = 1, коэффициент динамической нагрузки K д = 1,3 (для редукторов), а температурный коэффициент Kt = 1.
Работоспособность подшипника считается обеспеченной с вероятностью безотказной работы 0,9, если соблюдается условие
Lh ³ Lhe,
принимаемое по табл. 1.1. В противном случае необходимо использовать подшипники средней или тяжелой серии или, если это не приводит к цели, в опорах устанавливают радиально-упорные конические или шариковые радиально-упорные подшипники.
2.2. Опоры с коническими и шариковыми
радиально-упорными подшипниками
Для промежуточных валов редукторов с цилиндрическими зубчатыми колесами, в основном, применяется схема «враспор», показанная на рис. 2.6.
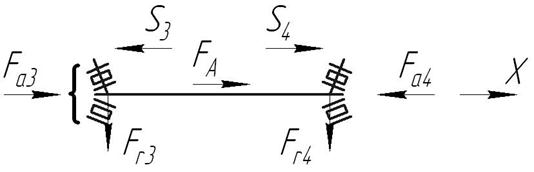
Рис. 2.6
2.2.1. Радиально-упорные конические подшипники
(тип 7000)
Конические радиально-упорные подшипники подбираются по ГОСТ 27365-87 исходя из ранее найденного диаметра d П. Из каталога находятся их параметры – размеры, динамическую грузоподъемность C и статическую грузоподъемность C 0, а также параметр осевого нагружения e и коэффициент осевой нагрузки Y. В случае, если в таблицах параметр e не приводится, его можно вычислить из условия:
e = 1,5 × tga, где a – угол контакта (обычно a = 12…18°).
Радиальные нагрузки определены выше (это Fr 3 и Fr 4), осевые нагрузки определяются в следующем порядке:
1) составляется уравнение равновесия, для нашего случая:
FA + Fa 3 – Fa 4 = 0;
2) подсчитываются значения собственных осевых составляющих
S 3 = 0,83 × e × Fr 3;
S 4 = 0,83 × e × Fr 4;
3) для обеспечения работоспособности подшипника необходимо соблюдения условий
Fa 3 ³ S 3 и Fa 4 ³ S 4,
нарушение которых приводит к перераспределению нагрузки на тела качения на один – два ролика и к резкому сокращению ресурса подшипника;
4) определяются Fa 3 и Fa 4, для чего статически неопределимая задача решается методом попыток. Сначала предполагают Fa 3 = S 3, при этом
Fa 4 = FA + S 3 ³ S 4.
При соблюдении этого условия назначаем:
Fa 3 = S 3 и Fa 4 = FA + S 3.
В противном случае принимают:
Fa 4 = S 4 и Fa 3 = S 4 – FA.
Эквивалентна нагрузка подсчитывается по формулам:
– при Fa / (V × Fr) £ e,
P = V × Fr × K д × Kt; (2.1)
– при Fa / (V × Fr) > e,
P = (X × V × Fr + Y × Fa) × K д × Kt
с подстановкой X = 0,4 и Y, выбранного из каталога.
Далее определяется ресурс подшипника Lh (см. п. 2.1) и проверяется условие Lh ³ Lhe.
2.2.2. Радиально-упорные шариковые подшипники
(тип 6000)
Алгоритм определения осевых сил аналогичен приведенному в п. 2.2.1, однако значение параметра осевого нагружения e зависит от отношения радиальной нагрузки к осевой Fa / (V × Fr) нелинейно и значение e определяется по табл. П3.3, П3.4 или 16.5 [2], по которой можно в зависимости от соотношения Fa / (V × Fr) ³ e или в противном случае выбрать коэффициенты X и Y и найти эквивалентную нагрузку по формулам (2.1).
3. Третий этап курсового проекта.
Конструирование основных
соединений, разработка эскиза
компоновки и определение
основных размеров корпусных
деталей








