 2015-03-20
2015-03-20 1397
1397Принцип действия основан на использовании нелинейных магнитных характеристик ферромагнитных материалов (изменения индуктивности рабочей обмотки в зависимости от насыщения ферромагнитного сердечника).
Достоинства МУ: высокая надежность, практически неограниченный срок службы, большая выходная мощность, возможность усиления малых сигналов. Их используют как усилители входных сигналов, поступающих от датчиков и других элементов автоматики, применяют в измерительных устройствах, вычислительных машинах.
Данные устройства подразделяются на нереверсивные (однотактные) и реверсивные (двухтактные).
МУ состоит их замкнутых ферромагнитных сердечников (их бывает обычно 2 или 3) на каждом из которых располагается обмотка. Одна из них является управляющей, а другие рабочими. МУ также называются дроссельными. Данные устройства подразделяются на реверсивные (однотактные) и реверсивные (двухтактные). Катушки могут работать от одно-и трехфазных токов, а выходной величиной может быть переменный, либо постоянный ток. Как правило, рабочая катушка питается, переменным током, а управляющая – постоянным.
Рассмотрим МУ, состоящий из трех сердечников. Его рабочая часть состоит из двух обмоток W1 и W2, которые расположены на крайних сердечниках и подключаются между собой последовательно и встречно, либо встречно-параллельно. Чаще подключение последовательное. Сопротивление нагрузки Rн подключается в цепь либо последовательно рабочим обмоткам, либо (реже) параллельно им. Обмотка управления WУ, расположенная на среднем сердечнике, обеспечивает его подмагничивание. Следовательно, от изменения тока в ней будет зависеть ток в рабочих обмотках и цепи нагрузки, а также выходное напряжение, т.е.
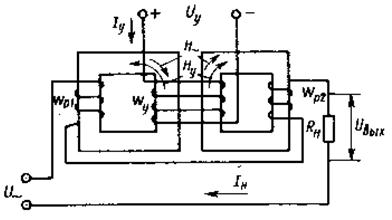 Uвых = f(Uдр) или Iн = f(Iу).
Uвых = f(Uдр) или Iн = f(Iу).
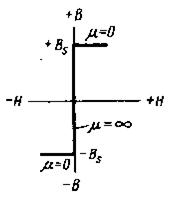 При анализе работы МУ для получения статических характеристик обычно рассматривают идеальное устройство, имеющее следующую характеристику намагничивания
При анализе работы МУ для получения статических характеристик обычно рассматривают идеальное устройство, имеющее следующую характеристику намагничивания
В = j(Н), ограниченную тремя прямыми,
где Н – напряжение магнитного поля;
В - магнитная индукция;
Вs - ндукция насыщения.
Т.е. при Н = 0, m ® µ и, следовательно, индуктивность рабочих обмоток L ® ∞. Скорость изменения магнитной индукции ½ dB/dH ½ ® ∞, а ½ B ½ < ½ Bs ½. В этом случае Iн = 0. Когда Н > 0, m = 0 и L = 0 и тогда ½ dB/dH ½ = 0, а
½ B ½ = ½ Bs ½. При этом Iн ® ∞.
Рассмотрим работу МУ при Iy = 0, когда нагрузка носит активный характер, сопротивление цепи управления мало, т.е. Rу << Rр + Rн и R ® 0. Магнитные потоки Ф1 и Ф2, создаваемые намагничивающими силами переменного тока направлены (в среднем сердечнике) навстречу друг другу и компенсируют друг друга, что исключает наведение здесь ЭДС переменного тока. Т.е. при подаче к рабочей цепи напряжения, которое меняется по синусоидальному закону U = Um sinwt, оба сердечника будут перемагничиваться. Индукции в них равны и будут изменяться по синусоидальному закону В1 = В2 = Вmsin(wt - p/2). При этом параметры усилителя выбирают так, чтобы Bm < Bs. Следовательно, магнитная проницаемость m и индуктивность рабочих катушек L велика, оба сердечника ненасыщенны и напряжение будет полностью приложено к рабочим обмоткам, а, следовательно, Iн = 0. В реальных МУ при Uу = 0 в рабочих обмотках протекает ток холостого хода.
При наличии входного сигнала магнитодвижущая сила Iywy создает в сердечниках постоянную составляющую индукции B0, которая в каждый полупериод подмагничивает один и размагничивает другой сердечник. Тогда индукции в сердечниках
В1 = - Вmcoswt + B0 ; (1,2)
В2 = - Вmcoswt - B0 ,
а, результирующая индукция В1 - В2 = 2В.
В начальный момент при wt = 0
В1 = - Вm + B0 - первый сердечник размагничивается,
В2 = - Вm - B0 = Вs - а второй вступает в насыщение.
Это ведет к резкому уменьшению m и L, ЭДС в рабочих обмотках наводиться не будет, и все напряжение источника питания будет приложено к нагрузке. Это приводит к скачкообразному возникновению тока в выходной цепи, уменьшающемуся к концу полупериода. В дальнейшем индукция будет изменяться по (1,2) и в следующем полупериоде все повторится, но при этом в насыщение будет входить другой сердечник. При насыщении сердечника индукция в нем не будет изменяться до конца полупериода.
Увеличение Iy вызывает увеличение постоянной составляющей индукции B0 в сердечниках и поэтому насыщение в ФМС наступает раньше, а длительность периода насыщения в течении которого протекает ток нагрузки увеличивается. Это обуславливает изменение среднего значения тока Iн, т.е. выходного сигнала.
 Характеристики МУ:
Характеристики МУ:
I. Установившийся режим:
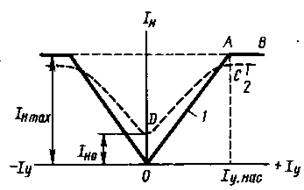
А. Статическая характеристика
1 – идеальная
2 – реальная
Кривая 1:
- точка О – режим холостого хода (Iу = 0 и Iн = 0);
- участок ОВ – рабочий режим (0 < Iн £ Iнmax при 0 < Iу £ Iунас):
1) участок ОА – управляемый (0 < Iн < Iнmax при 0 < Iу < Iунас)
 ;
;  ;
;
2) участок АВ – насыщения (Iн = Iнmax = const при Iу > Iунас)
– по току  ;
;
– по напряжению  ;
;
– по мощности  ;
;
В. КПД  ;
;
II. Переходный режим.
А. Дифференциальное уравнение  ,
,
где  , w - частота питающего напряжения.
, w - частота питающего напряжения.
Б. Передаточная функция  ,
,
где  - время запаздывания (время от начала подачи сигнала
- время запаздывания (время от начала подачи сигнала
до момента насыщения сердечника),
Sc – поперечная площадь сердечника.
МУ характеризуются также по величине «добротности», связывающей статические и динамические характеристики  .
.
Т.к. h = const, следовательно, D = f(w).
Магнитные усилители с внешней обратной связью.
Дроссельные МУ, рассмотренные выше, имеют сравнительно небольшие коэффициенты усиления и достаточно инерционны. При образовании обратной связи в МУ используют выходной сигнал устройства для создания дополнительной постоянной составляющей магнитного поля, накладывающейся на магнитное поле входного сигнала.
В МУ различают внешнюю, внутреннюю и смешанные обратные связи.
Рассмотрим схему устройства с внешней ОС по току. Сигнал ОС, пропорциональный выходному току подается на отдельную обмотку wос. Создаваемая им МДС накладывается на МДС входного сигнала.
Т.е. Iнwр ± Iywy = Iосwос (± - в зависимости от того положительная или отрицательная ОС)
При Iн = Iос Iнwр = Iуwу ± Iнwос или Iн (wр ± wос) = Iуwу ;
Откуда  , где
, где  .
.
На практике koc = 0,9 ¸ 0,97.
 ;
;  ;
; 
Когда отрицательной ОС, то в знаменателе данных выражений «+» и видно, что происходит уменьшение коэффициентов усиления. Когда же ПОС в знаменателе «–» и следовательно коэффициенты усиления увеличиваются. Увеличение может быть в 100¸900 раз.
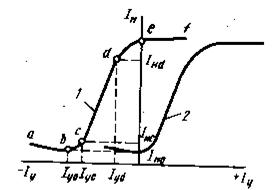
 Статическая характеристика данного МУ строится по статической МУ без обратной связи и прямой Iос = f(Iн), которая проводится из начала координат под углом a = arctg koc.
Статическая характеристика данного МУ строится по статической МУ без обратной связи и прямой Iос = f(Iн), которая проводится из начала координат под углом a = arctg koc.
Вначале, на статической характеристике МУ без обратной связи произвольно выбирается ряд точек А, В, С, Д, из которых проводятся прямые параллельные оси абсцисс и прямые параллельные прямой Iос = f(Iн). Из точек пересечения последних с осью абсцисс восстанавливаются перпендикуляры до пересечения с прямыми параллельными данной оси. Точки их пересечения А¢, В¢, С¢, Д¢ и будут являться статической характеристикой МУ с ОС.
Как видно из графика достоинством данных усилителей является малое значение Iy, а недостатком большое значение тока холостого хода.
Магнитные усилители с внутренней обратной связью.
Wсм – обмотка смещения.
 По рабочим обмоткам МУ протекает однополупериодный выпрямленный ток. Благодаря наличию диодов проводящий полупериод, который называется рабочим, чередуется с непроводящим управляющим полупериодом, причем каждый изних для одного сердечника будет рабочий, а для другого управляющим. Токи в рабочих обмотках возникают только в рабочий полупериод. Постоянная составляющая тока, пропорциональная току нагрузки, образует магнитодвижущую силу, под действием которой сердечник будет намагничиваться, вступая в насыщение, тем самым создавая эффект положительной обратной связи. Статическая характеристика данного МУ будет выглядеть следующим образом:
По рабочим обмоткам МУ протекает однополупериодный выпрямленный ток. Благодаря наличию диодов проводящий полупериод, который называется рабочим, чередуется с непроводящим управляющим полупериодом, причем каждый изних для одного сердечника будет рабочий, а для другого управляющим. Токи в рабочих обмотках возникают только в рабочий полупериод. Постоянная составляющая тока, пропорциональная току нагрузки, образует магнитодвижущую силу, под действием которой сердечник будет намагничиваться, вступая в насыщение, тем самым создавая эффект положительной обратной связи. Статическая характеристика данного МУ будет выглядеть следующим образом:
1 – кривая МУ без обмотки смещения;
2 – кривая МУ с обмоткой смещения;
Iн - ток холостого хода; сd – рабочий участок.
Т.к. току управления Iy должен соответствовать минимальный выходной сигнал (Iн ), статическая характеристика может быть смещена (кривая 1). Для того, чтобы этого не происходило, и используется одна из обмоток управления, которая называется обмоткой смещения.

