 2015-04-12
2015-04-12 578
578Upd(t) = Up(t) + Ud(t).
Пропорционально-интегрально-дифференциальный закон.
Upid(t) = Up(t) + Ud(t) + Ui(t).
· 
· - происходит уменьшение сигнала Ud(t) по экспоненте с постоянной времени Tf,
· - действие пропорциональной составляющей проявляется в величине Upo
- за счет интегральной составляющей Ui(t) ПИД сигнал будет возрастать по прямой линии
6 ЭЛЕКТРИЧЕСКИе РЕГУЛЯТОРы. ОБЩИЕ ПРИНЦИПы.
В электрических регуляторах практически всех судовых объектов регулирования используются исполнительные механизмы с асинхронными электродвигателями переменного тока.
Данные электродвигатели имеют следующие особенности:
- ротор двигателя вращается с постоянной частотой,
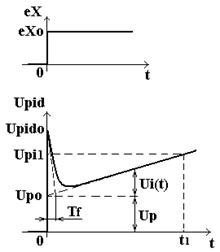
- управление двигателем заключается в подаче и отключении напряжения тока, то есть усилитель регулятора имеет релейную характеристику (см. рис. 4.1).
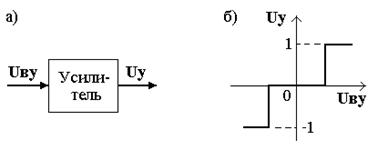
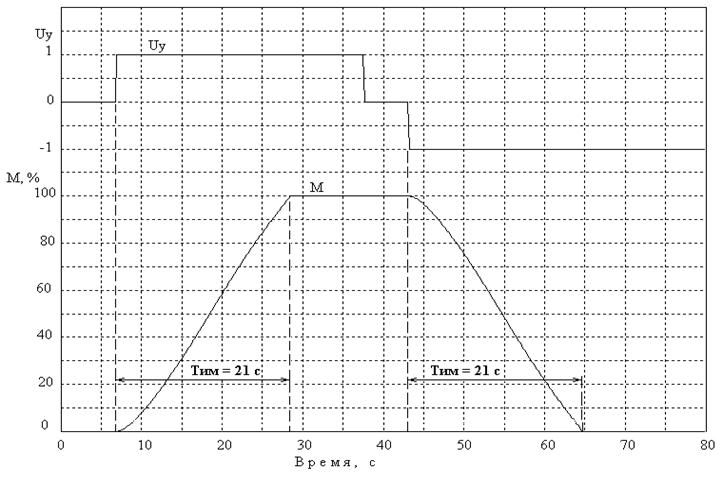
Значения сигнала на выходе релейного усилителя имеют следующий технический смысл:
Uу = 0 - напряжение на электродвигатель ИМ не подается, и ротор элек-
тродвигателя не вращается;
Uу = 1 - напряжение на электродвигатель ИМ подается таким образом,
что ротор электродвигателя вращается в направлении, обеспечи-
вающем открытие регулирующего органа;
Uу = -1 - напряжение на электродвигатель ИМ подается таким образом,
что ротор электродвигателя вращается в направлении, обеспечи-
вающем закрытие регулирующего органа.
Для перемещения регулирующих органов судовых регуляторов с такой скоростью, чтобы полный ход РО происходил за время от 2-х до 100 с, ИМ содержит понижающий редуктор.
К этим общим элементам относятся:
- электрический исполнительный механизм (ЭИМ),
- релейный усилитель (РУ),
- модуль нечувствительности (МН).
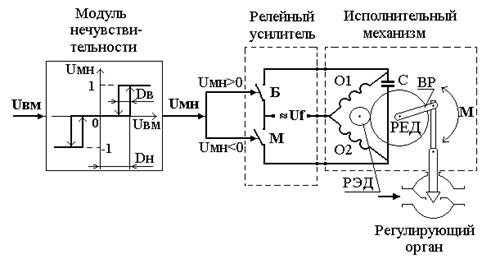
Модуль нечувствительности формирует сигнал Uмн, управляю-щий усилителем, по релейной характеристике. Характеристика МН имеет зону нечувствительности Dн и зону возврата Dв.
Зона нечувствительности необходима для обеспечения работы системы регулирования на равновесных режимах, когда регулирующий орган должен занимать постоянное положение. Это достигается отключением питания электродвигателя ИМ.
Зона возврата Dв предотвращает частое включение ИМ при небольших случайных изменениях сигнала Uвм на входе МН.
В качестве релейных усилителей в судовых электрических регуляторах применяются:
- контактные реле,
- транзисторные усилители,
- тиристорные усилители,
- реверсивные магнитные пускатели (для ИМ большой мощности).
Наибольшее распространение в судовой автоматике получили тиристорные усилители.
Для наглядности на рис. 4.2 показан усилитель с контактными ключами Б и М. Замыкание и размыкание ключей подает на электродвигатель напряжение Uf или отключает подачу напряжения.
В ИМ судовых электрических регуляторов используются, как правило, однофазные асинхронные конденсаторные электродвигатели
7 РЕГУЛЯТОР С ЖЕСТКОЙ ОБРАТНОЙ СВЯЗЬЮ
Используются, например,для регулирования давления пара в судовых паровых котлах.
Данный регулятор имеет параллельное КУ типа жесткой обратной связи, выходной сигнал которой определяется уравнением
Uос = Кос М
 |
Тим - время исполнительного механизма.
Тим представляет собой интервал изменения сигнала М от полного закрытия РО (М = 0) до полного открытия РО (М = 100%)
8 ЭЛЕКТРИЧ. РЕГУЛЯТОРЫ С ТИПОВЫМИ ЗАКОНАМИ РЕГУЛИРОВАНИЯ
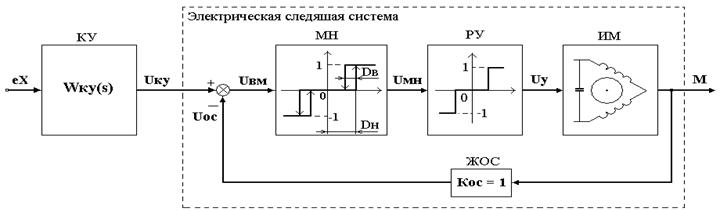
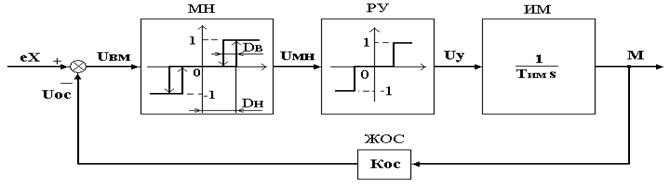
Регулятор содержит:
- послед. корректирующее устройство КУ, передаточная функция которого Wку(s)
- электрич. следящую сист., которая образована элем-ми, обвед-ми штрих. контуром.
На равновесных режимах работы регулятора (когда Uмн=0 и Uу=0) вып. условие:
êUку – Uос ê = êUвм ê< Dн,то есть с точностью до зоны нечувствительности Dн
Uос @ Uку.
Поскольку Uос = Кос М и для следящей системы Кос = 1, то М @ Uку.
Это означает, что следящая система перемещает исполнительный механизм в положение, соответствующее выходному сигналу КУ.
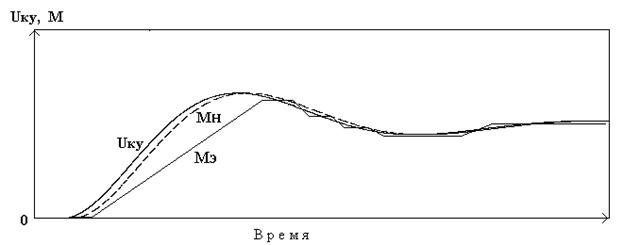
Пример графика работы электрической следящей системы показан рис., где:
Uку – изменение сигнала на выходе КУ,
Мн – перемещение ИМ в непрерывной следящей системе с переменной скоростью ИМ,
Мэ – перемещение ИМ в электрической следящей системе с постоянной скоростью ИМ.
Также как и для регулятора с жесткой обратной связью в данной следящей системе МН и РУ можно приближенно заменить эквивалентным непрерывным линейным усилителем и получить следующую приближенную передаточную функцию следящей системы
 .
.
Структурная схема рассматриваемого регулятора:

передаточная функция регулятора в этом случае имеет вид:
Wрег(s) = Wку(s) Wсс(s)
или Wрег(s) @ Wку(s).
Таким образом, данный регулятор перемещает ИМ в соответствии с законом регулирования, заложенным в последовательном КУ.
В данном регуляторе также может быть сделано дистанционное управление, аналогично типовой комбинированной системе регулирования.Рассмотренный принцип построения регуляторов используется в электрических регуляторах частоты вращения судовых дизелей
10 АВТОКОЛЕБ. В электрических сар
В замкнутых системах с МН, возможно возникновение автоколебаний
В таких системах могут появиться:
- высокочастотные колебания в контуре регулятора, собратной связью
- низкочастотные колебания в контуре всей системы регулирования.








