 2015-04-12
2015-04-12 619
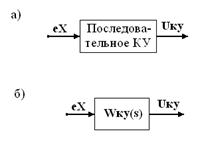
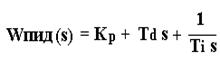
619Последовательное корректирующее устройство преобра-зует сигнал ошибки регулирования еХ в соответствии с передаточной функцией
Wку(s), которая отражает закон регулирования, заложен-
ный в КУ.
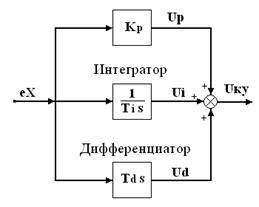
ПИД закон регулирования с параллельным преобразованием
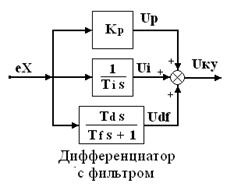
Дифференцирование реальных сигналов увеличивает амплитуды высокочастотных помех.
Для уменьшения влияния высокочастотных помех на работу САР последовательно с дифференциатором включается простейший фильтр, выполненный на апериодическом звене, ЛАЧХ которого также показана на рис. 3.4 (линия 2) [8].
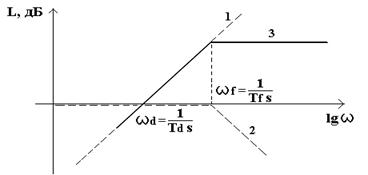
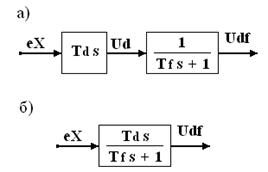
фильтр ограничивает амплитуды колебаний сигналов на выходе дифференциатора
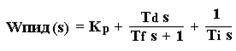 Передаточная функция модуля ПИД закона со структурной схемой на рис. 3.6 выражается следующим образом:
Передаточная функция модуля ПИД закона со структурной схемой на рис. 3.6 выражается следующим образом:
. (3.5)
ПИД закон регулирования с последовательным преобразованием сиг-налов можно получить по структурной схеме на рис. 3.10, составленной на основе схем, приведенных на рис. 3.7 и 3.8.
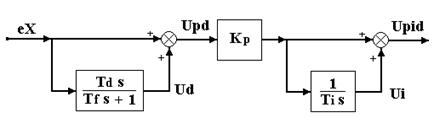
Передаточная функция ПИД закона регулирования в данном случае имеет вид:
 . (3.10)
. (3.10)
5 Изменение сигналов на выходе последовательных
корректирующих устройств








