 2015-04-12
2015-04-12 2725
2725Большинство систем автоматического регулирования судового энер-гетического оборудования построено по рассмотренным выше трем типовым схемам.Однако в судовой автоматике используются САР и с более сложными схемами.Примером такой системы регулирования может служить САР сжигания топлива, применяемая в некоторых судовых паровых котлах большой паро-производительности (см. рис. 2.13).
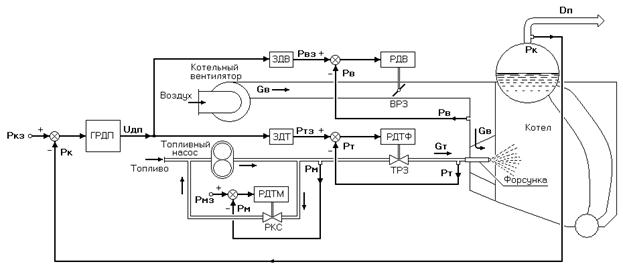
Рис. 2.13 Схема регулирования сжигания топлива в судовом
паровом котле
САР содержит 4 регулятора:
ГРДП - главный регулятор давления пара в котле Рк,
РДТФ - регулятор давления топлива перед форсункой Рт,
РДВ - регулятор давления воздуха Рв,
РДТМ - регулятор давления топлива в магистрали Рм.
РДТМ поддерживает давление топлива Рм в топливной магистрали перед топливным регулирующим золотником ТРЗ, равное постоянному заданному значению Рмз. РДТМ поддерживает давление, перемещая регулирующий клапан слива РКС, изменяющий расход топлива из напорной топливной магистрали в приемный трубопровод топливного насоса.
ГРДП по сигналу отклонения давления пара в котле Рк от заданного значения Ркз вырабатывает управляющий сигнал Uдп, который поступает на задатчики регуляторов давления топлива и воздуха ЗДТ и ЗДВ.
Задатчики формируют соответственно сигналы заданных значений дав-ления топлива перед форсункой Ртз и давления воздуха перед топочным уст-ройством Рвз.
РДТФ поддерживает давление топлива перед форсункой Рт, равное переменному заданному значению Ртз, путем перемещения ТРЗ.
Изменение давления Рт вызывает изменение расхода топлива в котел Gт и, тем самым, изменение давления пара в котле Рк.
РДВ поддерживает давление воздуха перед топочным устройством Рв, равное переменному заданному значению Рвз, путем перемещения воздушной регулирующей заслонки ВРЗ.
Изменение давления Рв вызывает изменение расхода воздуха в котел Gв и, тем самым, обеспечивает соотношение расходов воздуха и топлива, необходимое для нормального горения топлива.
Таким образом, котел как объект регулирования давления пара в данном случае представляет собой сложный объект, состоящий из (см. рис. 2.14):
ОРГ - главного объекта регулирования (собственно, котла), в котором регу-
лируемой величиной является давление пара Рк;
ОРВ - вспомогательного объекта регулирования (топливного трубопровода
с форсункой)), в котором регулируемой величиной является давление
топлива Рт.
Регулируемая величина ОРВ служит регулирующим воздействием для ОРГ.
Такая САР называется системой каскадного или подчиненного регули-рования.
Функциональная схема двухкаскадной САР в общем случае имеет вид, показанный на рис. 2.14, где обозначено:
Хг - главная регулируемая величина,
Хв - вспомогательная регулируемая величина,
Хдг - выходной сигнал датчика главной регулируемой величины ДГ,
Хдв - выходной сигнал датчика вспомогательной регулируемой величины
ДВ,
Хзг - выходной сигнал задатчика главной регулируемой величины ЗГ,
Хзв - сигнал заданного значения вспомогательной регулируемой величины
на выходе главного корректирующего устройства КУГ,
Uкув - выходной сигнал вспомогательного корректирующего устройства
КУВ,
Gв - регулирующее воздействие на ОРВ.
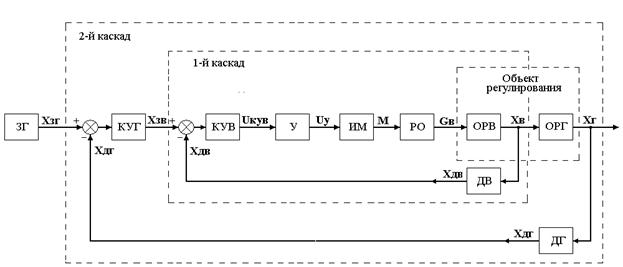
Рис. 2.14 Пример функциональной схемы двухкаскадной системы
регулирования.
Обозначения остальных элементов и сигналов ясны по предыдущим схемам.
Первый каскад системы представляет собой внутренний контур регули-рования вспомогательной регулируемой величины Хв. Этот контур содержит типовые функциональные элементы регулятора, рассмотренные выше. По-
следовательное корректирующее устройство КУВ обеспечивает требуемое качество работы внутреннего контура.
Второй каскад системы представляет собой внешний контур регулиро-вания главной регулируемой величины Хг. Последовательное корректиру-
ющее устройство второго каскада КУГ вырабатывает сигнал Хзв заданного значения вспомогательной регулируемой величины для первого каскада.
Для САР сжигания топлива (рис. 2.14) главной регулируемой величиной является давление пара в котле Рк, а вспомогательной – давление топлива перед форсункой Рт. Функциональная схема данной САР полностью соответствует рис. 2.14.
Следует отметить, что типовая комбинированная САР, рассмотренная в предыдущем подразделе (см. рис. 2.7) является частным случаем двухкаскад-ной системы. Первым каскадом САР в ней служит следящая система, которая представляет собой внутренний контур регулирования положения ИМ, причем передаточная функция вспомогательного корректирующего устройства Wкув(s)=1.
Каскадные САР теоретически могут иметь сколь угодно много контуров регулирования.
Пример схемы трехкаскадной САР приведен на рис. 2.15.
Отличие данной системы от предыдущей двухкаскадной заключается в том, что первый каскад представляет собой контур регулирования положения ИМ (следящую систему), содержащий:
ДПИМ – датчик положения ИМ, выполняющий функцию жесткой обратной
связи,
КУП - последовательное корректирующее устройство (позиционирования
15 ЭЛЕКТРОПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
В автоматике судового энергетического оборудования достаточно широко применяются электропневматические регуляторы, содержащие пневматические исполнительные механизмы.
Это объясняется следующими обстоятельствами:
- пневматические ИМ при малых габаритах развивают большие перестано-
вочные усилия;
- пневматические ИМ могут перемещать регулирующие органы с перемен-
ной скоростью, уменьшая скорость при выходе САР на равновесный ре-
жим, что благоприятно сказывается на качестве работы системы;
- пневматические элементы могут размещаться в пожаро- и взрывоопасных
помещениях судна, например, на танкере.
Поэтому соединение электрических (микропроцессорных) элементов, позволяющих формировать сложные алгоритмы управления, и пневматических ИМ, обладающих приведенными выше положительными свойствами, дает возможность получать системы автоматики с хорошими рабочими свойствами.
Для перехода от электрических элементов к пневматическим в регуляторах применяются электропневматические преобразователи (ЭПП) двух типов:
- релейные,
- непрерывные.
Схема электропневматического регулятора с релейным электропневматическим преобразователем показана на рис. 9.1.
Регулятор по своему устройству и рабочим свойствам, в основном, подобен электрическому регулятору с последовательным КУ и следящей системой (см. рис. 6.1).
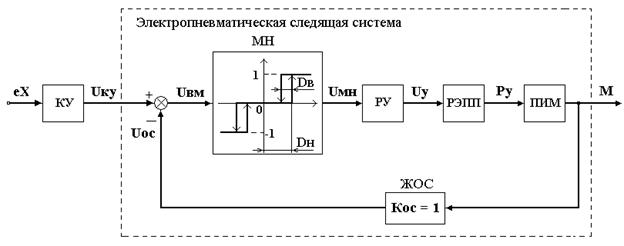 Рис. 9.1 Схема электропневматического регулятора с релейным
Рис. 9.1 Схема электропневматического регулятора с релейным
электропневматическим преобразователем.
В отличие от упомянутого регулятора следящая система рассматриваемого регулятора является электропневматической и содержит следующие элементы:
- модуль нечувствительности МН, такой же как и в чисто электрическом ре-
гуляторе (рис. 4.2, 6.1);
- релейный электрический усилитель РУ, мощность которого в данном слу-
чае должна быть достаточной для преобразования электрического сигнала
в давление сжатого воздуха (а не для питания электрического ИМ);
- релейный электропневматический преобразователь РЭПП, преобразующий
выходной сигнал РУ Uу в давление сжатого воздуха Ру по характеристике,
приведенной на рис. 9.2;
- пневматический исполнительный механизм ПИМ, который преобразует
давление воздуха Ру, поступающего на ПИМ от РЭПП, в механическое пе-
ремещение.
Рис. 9.2 Характеристика релейного электропневматического
преобразователя.
Пример конструкции РЭПП и ПИМ, использованной в электропневматическом регуляторе частоты вращения главных дизелей DGS 8800 фирмы Norcontrol, показан на рис. 9.3.

Рис. 9.3 Схема релейного электропневматического преобразователя
и пневматического исполнительного механизма.
В данном регуляторе в качестве ПИМ использован пневматический двухсторонний поршневой сервомотор.
РЭПП представляет собой комплект из 4-х запорных клапанов с электромагнитным приводом. Управление клапанами производится сигналами от усилителя Uу таким образом:
- при Uу > 0 в верхнюю полость сервомотора поступает сжатый воздух с
давлением Рпит, нижняя полость сервомотора соединяется с атмосферой, и
поршень и шток сервомотора перемещаются вниз;
- при Uу < 0 действие рассматриваемых элементов является противополож-
ным.
16 РЕГУЛЯТОРЫ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА
Использование в исполнительных механизмах электрических систем регулирования и управления электродвигателей с постоянной частотой вращения позволяет получить наиболее простые по устройству и надежные системы автоматизации.
Рассмотренные выше электрические регуляторы такого типа обеспе-чивают необходимые показатели поддержания регулируемых величин большинства судовых агрегатов и механизмов.
Однако, в ряде случаев требуемое качество регулирования (например, регулирования частоты вращения судовых дизелей) при постоянной скорости перемещения ИМ получить невозможно.
Основной причиной применения в судовой автоматике регуляторов с переменной скоростью ИМ является инерционность ИМ и регулирующего органа, которая не позволяет уменьшить зону нечувствительности регулятора настолько, чтобы обеспечить требуемую точность поддержания регулируемой величины и отсутствие автоколебаний в контуре регулятора.
Эта проблема имеет особо важное значение для регуляторов частоты вращения судовых дизелей, которые должны перемещать топливные рейки дизелей со скоростью на один-два порядка большей скоростей перемещения регулирующих органов остальных агрегатов и механизмов судовой энергетической установки, обеспечивая при этом повышенную точность установки топливных реек в заданное положение.
Устройство конкретных регуляторов с переменной скоростью ИМ определяется:
- типом электродвигателя ИМ и усилителя,
- способом управления усилителем, обеспечивающим переменную скорость
ИМ,
- типами элементов, используемых как задатчики и обратные связи.Как правило, такие регуляторы имеют типовую схему с последова-тельным КУ и следящей системой. Данную схему имеют судовые регуляторы фирмы Norcontrol, имеющие в своем составе универсальные микропроцессорные контроллеры [27], [34], [35].Схема системы регулирования с переменной скоростью ИМ, содержащая упомянутые контроллеры, приведена на рис. 10.1.
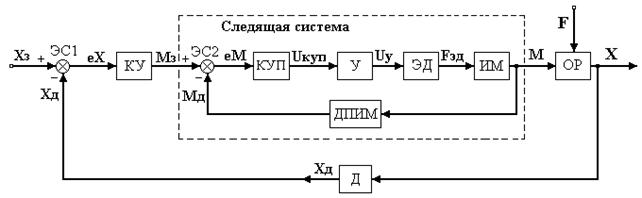
Рис. 10.1 Функциональная схема САР с переменной
скоростью ИМ.
Таким образом, рассматриваемая система регулирования является 2-х каскадной (см. подраздел 2.4).
Следящая система представляет собой внутренний контур регулирования положения ИМ. (1-й каскад).
На схеме выделены как отдельные элементы:
- электродвигатель исполнительного механизма ЭД;
- последовательное корректирующее устройство КУ, формирующее сигнал за
данного положения ИМ Мз, в соответствии с законом регулирования;
- датчик положения исполнительного механизма ДПИМ, формирующий сигнал
жесткой обратной связи Мд по положению ИМ с коэффициентом обратной
связи Кос = 1,
- корректирующее устройство позиционирования исполнительного механизма
КУП.
Усилитель в таких регуляторах является довольно сложным устройством, который, однако, по своему поведению можно рассматривать как усилитель с
непрерывной линейной характеристикой, описываемой передаточной функцией:
Wу(s) = Ку,
где Ку - коэффициент усиления усилителя.
Можно считать, что выходной сигнал усилителя Uу изменяется пропор-ционально сигналу входному сигналу Uкуп. Вследствие этого частота вращения электродвигателя Fэд и скорость ИМ являются переменными величинами.
Электродвигатель ИМ рассматривается обычно как типовое динамическое инерционное звено с передаточной функцией
Независимо от технического исполнения можно считать, что ДПИМ имеет передаточную функцию равную 1.
Передаточная функция КУП Wкуп(s) выбирается таким образом, чтобы обеспечить требуемое качество переходных процессов перемещения ИМ.
Чаще всего, КУП формирует П или ПИ закон регулирования.
В большинстве случаев КУП может отсутствовать, то есть при расчетах можно принять Wкуп(s)=1.
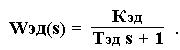
Динамическое поведение рассматриваемого регулятора отражается его структурной схемой, показанной на рис. 10.2.
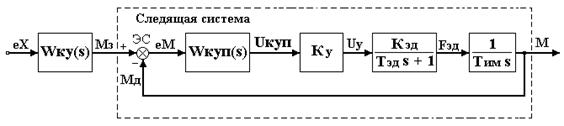
Рис. 10.2 Структурная схема регулятора с переменной скоростью ИМ.
В ряде случаев, например, при регулировании частоты вращения судовых дизелей, оказывается эффективным применять следящие системы с внутренним контуром регулирования частоты вращения электродвигателя ИМ [28], [30], [32].
Схема такой САР приведена на рис. 10.3. Система регулирования в данном случае является 3-х каскадной.
17 НАЛАДКА ЭЛЕКТРИЧЕСКИХ СИСТЕМ
РЕГУЛИРОВАНИЯ
Электронные и микропроцессорные системы автоматизации предо-ставляют судовому персоналу широкие возможности настройки характеристик элементов регуляторов.
Особенно важное значение при этом имеет инженерная наладка САР, под которой понимается [13] определение и установка на регуляторе значений настроечных параметров, обеспечивающих требуемое качество работы системы в процессе эксплуатации.
Существует довольно большое число методов инженерной наладки САР [13].
Для наладки САР судовыми механиками и электромеханиками в эксплуатационных условиях можно считать наиболее подходящими следующие методы:
- наладка по экспериментальным динамическим характеристикам объектов
регулирования,
- наладка по незатухающим колебаниям,
- алгоритмическая наладка.
В общем случае наладка САР содержит следующие этапы:
- определение требований к качеству работы САР,
- экспериментальное определение динамических характеристик объектов,
- определение оптимальных значений настроечных параметров регулятора,
- установка рассчитанных значений параметров на регуляторе,
- проверка работы регулятора и уточнение (при необходимости) настроеч-
ных параметров.

