2015-04-12
2015-04-12 1223
1223Изменение регулируемых величин судовых объектов регулирования происходит во времени вследствие изменения:
- нагрузки объекта,
- заданного значения регулируемой величины,
- других возмущающих воздействий на ОР.
Изменение нагрузки имеет место для всех судовых агрегатов и механиз-мов, тогда как изменение задания регулируемой величины характерно, в основном, для главных судовых двигателей.
Примеры переходных процессов в системах автоматического регулирования приведены на рис. 13.1 - 13.4.
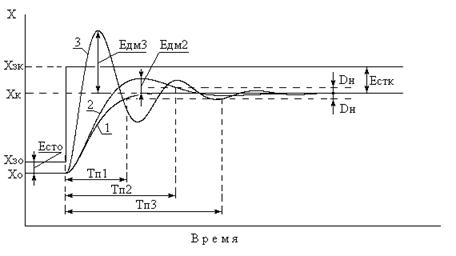
Рис. 13.1 Переходные процессы при изменении задания
в статической системе
Качество работы системы автоматического регулирования оценивается:
- по статической ошибке системы,
- по показателям переходных процессов.
Как известно, по своим статическим характеристикам делятся на:
- статические,
- астатические.
Статическими являются системы с П и ПД регуляторами.
Астатическими являются системы с ПИ и ПИД регуляторами.
Статические системы имеют статическую ошибку, проявляющуюся как разность между заданным значением регулируемой величины и ее значением на установившемся режиме работы системы.
На рис. 13.1 и 13.3 показаны переходные процессы в статических системах, где обозначено:
Есто = Хз – Хо - статическая ошибка на начальном установившемся режиме,
Естк = Хз – Хк - статическая ошибка на конечном установившемся режиме.
В астатических системах (см. рис. 13.2 и 13.4) статическая ошибка отсутствует (Ест=0).
- вид переходного процесса,
- время переходного процесса Тп,
- максимальное динамическое отклонение dXм.
Переходные процессы могут иметь следующий вид:
- монотонный (линии 1 на рис. 13.1,),
- апериодический (линии 2 на рис. 13.1),
- колебательный (линии 3 на рис. 13.1).
Время переходного процесса Тп определяется как интервал времени от момента возмущения на систему до момента, когда отклонение регулируемой величины от нового установившегося значения становится и остается меньше заданной достаточно малой величины Dн.
В качестве Dн, как правило, принимается нечувствительность регулятора, указанная в его технической документации (см. табл. 13.2).
Определение значения максимального динамического отклонения регулируемой величины в переходном процессе dXм ясно из графиков на рис. 13.1-13.4.
Следует отметить, что в нормативной литературе по эксплуатации судовых энергетических установок и их автоматики [14 ], [15], [16] требования к качеству работы САР судового энергетического оборудования (за исключением дизелей) приводятся в общем виде. Поэтому в каждом конкретном случае при определении этих требований необходимо использовать техническую документацию судовых агрегатов и механизмов.
Предельные значения показателей работы САР судового энергетического оборудования, приведенные в учебной литературе [9], [11], [21] по автоматизации СЭУ, содержатся в таблицах 13.1 и 13.2.
Применяемые методы инженерной наладки САР [13] определяют настроечные параметры регуляторов по переходным процессам при изменении заданного значения регулируемой величины.
Настройка производится таким образом, чтобы регулятор обеспечил оптимальное значение выбранного критерия оценки качества работы САР (критерия оптимальности).
18 Экспериментальное определение динамичуских характеристик объектов
регулирования
Из всех известных методов экспериментального определения динами-ческих характеристик объектов регулирования для судовых условий наиболее
подходит решение данной задачи с помощью разгонных характеристик объектов.
Разгонные характеристики ОР получают, задавая скачкообразное измене-ние регулирующего воздействия или нагрузки.
Все методы наладки основаны на том, что регулятор имеет идеальный закон регулирования, тогда как в реальном регуляторе закон искажается динамическими характеристиками элементов регулятора (датчика, усилителя, ИМ).
Поэтому для применения методов наладки необходимо все элементы регулятора условно включить в состав ОР, что дает “приведенный” объект регулирования.
Выделение приведенного ОР в структурной схеме САР показано на рис. 13.5, а структурная схема САР с приведенным ОР показана на рис. 13.6, гдепередаточная функция приведенного объекта:
Wпор(s) = Wу(s) Wим(s) Wор(s) Wд(s).
.
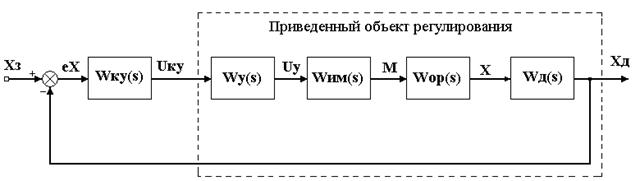
Рис. 13.5 Выделение приведенного объекта регулирования.
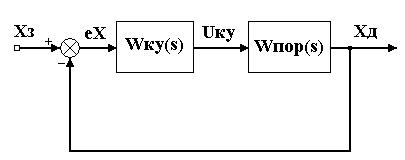
Рис. 13.6 Структурная схема САР с приведенным объектом
регулирования.
Для судовых устойчивых ОР (приведенных) разгонные характеристики, как правило, имеют вид, показанный на рис. 13.7.
Это соответствует многоемкостному объекту, динамические свойства которого приближенно описываются следующей передаточной функцией [13]:
Коэффициент передачи ОР по регулирующему воздействию определится по экспериментальной разгонной характеристике как
Kор = dХд / dUку.
Для судовых нейтральных ОР (приведенных) разгонные характеристики, как правило, имеют вид, показанный на рис. 13.8.
Это также соответствует многоемкостному нейтральному объекту, динамические свойства которого приближенно описываются следующей передаточной функцией [13]: