 2015-04-12
2015-04-12 2602
2602ЛЕКЦИЯ №1
I. Определение понятия "гироскоп"
В переводе с греческого олово "гироскоп" означает "указатель вращения". Поэтому под гироскопом можно понимать всякое устройство, основанное на любом явлении, которое может быть использовано для обнаружения и измерения вращения в инерциальном пространстве. Под инерциальным пространством мы будем понимать солнечную систему.
В общей динамике твердого тела гироскопом называется тело произвольной формы, совершающее вращение вокруг неподвижной точки.
Однако в технике, в том числе в навигационных гироскопических приборах, под гироскопом понимается устройство, состоящее из динамически симметричного быстровращающегося ротора и системы опор, которые обеспечивают вращение ротора вокруг неподвижной точки, лежащей на его оси симметрии.
 Динамически симметричным называется ротор, у которого моменты инерции относительно осей У и Z гироскопа имеют одинаковую величину.
Динамически симметричным называется ротор, у которого моменты инерции относительно осей У и Z гироскопа имеют одинаковую величину.
Быстровращающимся называется такой ротор, у которого угловая скорость собственного вращения вокруг оси симметрии во много раз больше угловой скорости вращения вокруг другой его оси. При этом под собственным вращением гироскопа понимается угловая скорость вращения ротора, вокруг оси симметрии.
рис. 1
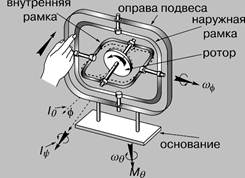
Для уяснения понятия "гироскоп" воспользуемся лабораторным гироскопом в кардановом подвесе рис.1. Лабораторный гироскоп состоит из ротора, внутренней рамки, наружной рамки 3, вертикального кольца (оправы подвеса) и основания.
Ротор гироскопа представляет собой массивный диск, который жестко укреплен на оси, входящей в два диаметрально противоположных подшипника внутренней рамки эта ось называется главной осью гироскопа и обозначается X. Таким образом, вокруг оси X совершается собственное вращение ротора гироскопа. Цапфы внутренней рамки входят в подшипники внешней рамки, определяя ось У гироскопа. Вокруг этой оси ротор может поворачиваться вместе с внутренней рамкой. Цапфы внешней рамки входят в подшипники вертикального кольца (оправы подвеса), укрепленного на основании. В вертикальном кольце ротор может поворачиваться вместе с внутренней и внешними рамками вокруг вертикальной оси Z гироскопа.
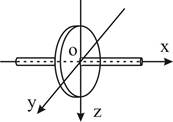 Оси X, У и Z как бы жестко связаны с точкой подвеса гироскопа (0), образуя систему координат0XYZ, неподвижную относительно гироскопа рис. 2. На рис. 2 изображена правая система координат, (которой будем пользоваться в дальнейшем). B системе координат OXYZ оси У и Z называются экваториальными осями гироскопа; ось У. лежит в одной горизонтальной плоскости с главной осью X, перпендикулярно последней. Перпендикулярно плоскости ХОУ лежит ось Z гироскопа.
Оси X, У и Z как бы жестко связаны с точкой подвеса гироскопа (0), образуя систему координат0XYZ, неподвижную относительно гироскопа рис. 2. На рис. 2 изображена правая система координат, (которой будем пользоваться в дальнейшем). B системе координат OXYZ оси У и Z называются экваториальными осями гироскопа; ось У. лежит в одной горизонтальной плоскости с главной осью X, перпендикулярно последней. Перпендикулярно плоскости ХОУ лежит ось Z гироскопа.
Рис.2
В теории гироскопа рассматриваются только поворотные движениягироскопа относительно точки пересечения осей ХУZ, называемой точкой подвеса гироскопа (0).
Если гироскоп может вращаться одновременно вокруг трех своих осей Х, У, Z, то он называется гироскопом с тремя степенями свободы. Если гироскоп лишен возможности вращаться вокруг одной из осей У или Z, то такой гироскоп называется гироскопом с.двумя степенями свободы. Ограничение свободы вращения гироскопа достигается упругой или неполной связью по оси У или Z. Если лишить гироскоп возможности вращаться вокруг обеих осей У и Z, то такой гироскоп называется гироскопом с одной степенью свободы.
Гироскоп, у которого центр тяжести совпадает с точкой подвеса, называется астатическим, или уравновешенным.
Свободным гироскопом называется астатический гироскоп, у которого сумма моментов всех внешних сил по любой его оси равна нулю. При этом под внешними понимаются любые силы, которые могут вызвать возмещение (изменение направления главной оси Х) в движении гироскопа, в том числе силы трения, реакции, инерции, магнитные силы и др.
Изготовить свободный гироскоп практически невозможно. Поэтому в прикладной теории гироскопа под свободным гироскопом понимается астатический гироскоп, у которого сумма моментов всех внешних сил по любой его оси практически сведена к минимуму.
Различают два основных типа гироскопов:
- гироскопы с двумя степенями свободы;
- гироскопы с тремя двумя степенями свободы, которые в свою очередь подразделяются на астатические и позиционные.
Позиционный гироскоп это неуравновешенный гироскоп обладает избирательностью по отношению к некоторому направлению.
При отклонении оси позиционного гироскопа от этого направления возникает сила, стремящаяся вернуть ось гироскопа в исходное положение.
Для придания позиционных свойств применяют два способа:
- смещение центра тяжести гироскопа относительно точки подвеса;
- применение маятниковой системы коррекции.

