 2015-04-17
2015-04-17 1754
1754В ПИ-регуляторе только постоянная дифференцирования равна нулю,  :
:

АЧХ ПИ-регулятора можно получить из рис. 5.36, если отбросить правую ветвь АЧХ с наклоном +20 дБ/дек. При этом сдвиг фаз на частотах выше 1 Гц (на рис. 5.36) не превысит уровень 0˚. Таким образом, ПИ-регулятор имеет два существенных положительных отличия от И-регулятора: во-первых, его усиление на всех частотах не может стать меньше  , следовательно, увеличивается динамическая точность регулирования, во-вторых, по сравнению с И-регулятором, он вносит дополнительный сдвиг фаз только в области низких частот, что увеличивает запас устойчивости замкнутой системы. Оба фактора дают дополнительные степени свободы для оптимизации качества регулирования. В то же время, как и в И-регуляторе, модуль коэффициента передачи регулятора с уменьшением частоты стремится к бесконечности, обеспечивая тем самым нулевую ошибку в установившемся режиме. Отсутствие сдвига фаз на высоких частотах позволяет увеличить скорость нарастания управляемой переменной (по сравнению с И-регулятором) без снижения запаса устойчивости. Однако это справедливо до тех пор, пока пропорциональный коэффициент не станет настолько большой, что увеличит усиление контура до единицы на частоте
, следовательно, увеличивается динамическая точность регулирования, во-вторых, по сравнению с И-регулятором, он вносит дополнительный сдвиг фаз только в области низких частот, что увеличивает запас устойчивости замкнутой системы. Оба фактора дают дополнительные степени свободы для оптимизации качества регулирования. В то же время, как и в И-регуляторе, модуль коэффициента передачи регулятора с уменьшением частоты стремится к бесконечности, обеспечивая тем самым нулевую ошибку в установившемся режиме. Отсутствие сдвига фаз на высоких частотах позволяет увеличить скорость нарастания управляемой переменной (по сравнению с И-регулятором) без снижения запаса устойчивости. Однако это справедливо до тех пор, пока пропорциональный коэффициент не станет настолько большой, что увеличит усиление контура до единицы на частоте  .
.
Рис. 5.39. Реакция замкнутой системы с ПИ регулятором на скачок  при
при  для объекта вида (5.50) при
для объекта вида (5.50) при 
Рис. 5.40. Реакция замкнутой системы с ПИ регулятором на скачок  при
при  для объекта вида (5.50) при
для объекта вида (5.50) при 
Переходный процесс в ПИ-регуляторе при разных сочетаниях  и показан на рис. 5.39, рис. 5.40. При
и показан на рис. 5.39, рис. 5.40. При  (рис. 5.39) получаем И-регулятор. С ростом пропорционального коэффициента появляется дополнительная ошибка во время переходного процесса (см. также рис. 5.37 и (5.45)), которая уменьшается с ростом , однако при этом снижается запас устойчивости системы, поскольку с ростом увеличивается усиление на частоте
(рис. 5.39) получаем И-регулятор. С ростом пропорционального коэффициента появляется дополнительная ошибка во время переходного процесса (см. также рис. 5.37 и (5.45)), которая уменьшается с ростом , однако при этом снижается запас устойчивости системы, поскольку с ростом увеличивается усиление на частоте  . Это приводит к появлению затухающих колебаний в начале переходного процесса (рис. 5.39). Когда величина становится достаточно большой для компенсации ослабления сигнала в объекте на частоте , в системе появляются незатухающие колебания.
. Это приводит к появлению затухающих колебаний в начале переходного процесса (рис. 5.39). Когда величина становится достаточно большой для компенсации ослабления сигнала в объекте на частоте , в системе появляются незатухающие колебания.
Следует отметить, что в отличие от П-регулятора, в котором ошибка остается в установившемся режиме, наличие интегрального члена в ПИ-регуляторе сводит эту ошибку в идеальном регуляторе до нуля, как в И-регуляторе. Выражение для ошибки ПИ-регулятора можно получить, подставив (5.51) в (5.41) и вычтя из полученного выражения  :
:
 . . |
Как видим, при  , т.е. в установившемся режиме, ошибка
, т.е. в установившемся режиме, ошибка  .
.
Однако появление пропорционального коэффициента приводит к затягиванию переходного процесса по сравнению с И-регулятором при тех же  и
и  , (рис. 5.39). Объясняется это тем, что в ПИ-регуляторе сигнал ошибки
, (рис. 5.39). Объясняется это тем, что в ПИ-регуляторе сигнал ошибки  , поступающий на вход интегратора, меньше, чем в И-регуляторе (он уменьшается благодаря пропорциональному коэффициенту), поэтому сигнал, компенсирующий ошибку
, поступающий на вход интегратора, меньше, чем в И-регуляторе (он уменьшается благодаря пропорциональному коэффициенту), поэтому сигнал, компенсирующий ошибку  нарастает медленнее, чем в И-регуляторе. В частотной области этот процесс можно объяснить тем, что с ростом полюс
нарастает медленнее, чем в И-регуляторе. В частотной области этот процесс можно объяснить тем, что с ростом полюс  передаточной функции смещается влево (рис. 5.36), т.е. расширяется область частот, в которой интегральной составляющая пренебрежимо мала и ПИ-регулятор вырождается в чистый П-регулятор, для которого характерна статическая ошибка. В АЧХ замкнутой системы с большим (рис. 5.41) появляется погрешность (уменьшение амплитуды выходного сигнала) в диапазоне частот выше . С ростом эта частота сдвигается влево, что во временной области соответствует затягиванию процесса установления.
передаточной функции смещается влево (рис. 5.36), т.е. расширяется область частот, в которой интегральной составляющая пренебрежимо мала и ПИ-регулятор вырождается в чистый П-регулятор, для которого характерна статическая ошибка. В АЧХ замкнутой системы с большим (рис. 5.41) появляется погрешность (уменьшение амплитуды выходного сигнала) в диапазоне частот выше . С ростом эта частота сдвигается влево, что во временной области соответствует затягиванию процесса установления.
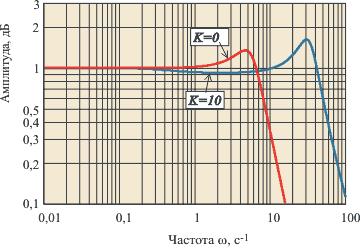
Рис. 5.41. АЧХ замкнутого контура с ПИ-регулятором при  для объекта вида (5.50) при
для объекта вида (5.50) при








