 2015-04-17
2015-04-17 819
819Классический ПИД-регулятор
Простейшая система автоматического регулирования с обратной связью показана на рис. 5.34. В ней блок R называют регулятором (от слова Regulator), P - объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
Если выходная переменная u регулятора описывается выражением
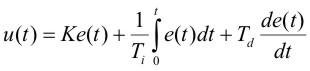
где t - время; K,Ti,Td - пропорциональный коэффициент (безразмерный), постоянная интегрирования (размерность времени) и постоянная дифференцирования (размерность времени) регулятора, то такой регулятор называют ПИД-регулятором.
В частном случае пропорциональная, интегральная или дифференциальная компоненты могут отсутствовать и такие упрощенные регуляторы называют П, И или ПИ регуляторами.
Распространены также следующие модификации выражения (5.36):
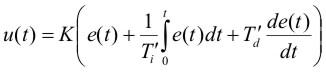
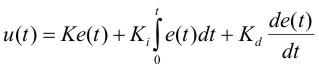

Рис. 5.34. ПИД-регулятор в системе с обратной связью
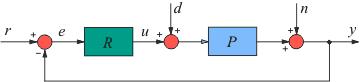
Рис. 5.35. ПИД-регулятор в системе с шумом n и внешними возмущениями d
Между параметрами выражений (5.36) - (5.38) существует простая связь. Однако отсутствие общепринятой системы параметров часто приводит к путанице. Это нужно помнить при замене одного ПИД контроллера на другой, при задании его параметров или использовании программ настройки параметров. Мы будем пользоваться выражением (5.36).
Следует подчеркнуть, что входом объекта управления на всех рисунках является выход регулятора, т.е. величина u, которая в соответствии c (5.36)-(5.38) и рис. 5.34 имеет ту же размерность, что и рассогласование e, выходная величина y и уставка r. Т.е., если объект управляется, например, ШИМ-регулятором, током, или частотой вращения вала, во всех этих случаях управляющей величиной является u, а в модель объекта управления P следут ввести преобразователь величины u в ширину импульса ШИМ-регулятора, в ток или в частоту вращения вала соответственно. Это надо учитывать также при задании входного воздействия в экспериментах для настройки регулятора (см. раздел "Расчет параметров"). Таким воздействием во всех случаях должна быть величина u (выходная величина регулятора).
Используя преобразование Лапласа при нулевых начальных условиях u(0)=0, выражение (5.36) можно представить в операторной форме:
Таким образом, передаточная функция ПИД-регулятора имеет вид

Амплитудно-частотная и фазо-частотная характеристика передаточной функции (5.40) при параметрах Ti =1с, Td =1с, K =10 показаны на рис. 5.36. Переходная характеристика ПИД-регулятора (реакция на единичный скачок) представляет собой сумму постоянной составляющей  , прямой линии
, прямой линии  , полученной при интегрировании единичного скачка и дельта-функции Дирака
, полученной при интегрировании единичного скачка и дельта-функции Дирака  , полученной при дифференцировании единичного скачка.
, полученной при дифференцировании единичного скачка.
Из рис. 5.34 следует, что
 или
или 
где  - передаточная функция замкнутой системы.
- передаточная функция замкнутой системы.
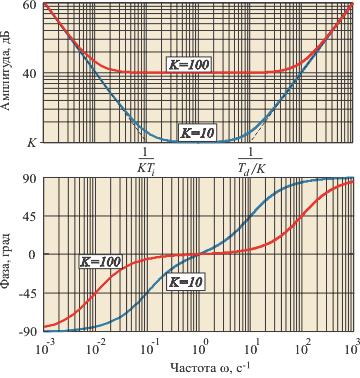
Рис. 5.36. АЧХ и ФЧХ ПИД-регулятора при Ti =1 с, Td =1 с, K=10 и K=100
На систему автоматического регулирования могут воздействовать внешние возмущения  и шум измерений
и шум измерений  (рис. 5.35). Внешние возмущения (влияние нагрузки, изменение температуры окружающей среды, ветер, течение воды и т.п.) обычно распределены пространственно по объекту, однако для упрощения анализа их моделируют сосредоточенным источником
(рис. 5.35). Внешние возмущения (влияние нагрузки, изменение температуры окружающей среды, ветер, течение воды и т.п.) обычно распределены пространственно по объекту, однако для упрощения анализа их моделируют сосредоточенным источником  , приложенным к входу или источником
, приложенным к входу или источником  , приложенным к выходу объекта. Источник шума
, приложенным к выходу объекта. Источник шума  моделирует погрешность измерений выходной переменой
моделирует погрешность измерений выходной переменой  , погрешность датчика, а также помехи (см. [Денисенко]), воздействующие на канал передачи сигнала с выхода системы на ее вход.
, погрешность датчика, а также помехи (см. [Денисенко]), воздействующие на канал передачи сигнала с выхода системы на ее вход.
С учетом возмущающих воздействий и шума уравнение системы автоматического управления примет вид

Рассмотрим частные случаи.








