 2015-04-01
2015-04-01 1969
1969или А=  (2.2)
(2.2)
А=  (2.3)
(2.3)
здесь  (2.4)
(2.4)
имеет размерность массы и называется эквивалентной массой вращающихся частей. Обозначив отношение эквивалентной массы к физической массе mэ/m через γ и подставив γ в выражение (2.3), получим
А=  (2.5)
(2.5)
Величину (1+γ) называют коэффициентом инерции вращающихся частей, а произведение физической массы m на этот коэффициент - приведенной массой подвижного состава m пр. Таким образом, подвижной состав с массой m эквивалентен телу, не имеющему вращающихся частей, но с массой, равной приведенной m пр = m (1+γ), и движущемуся со скоростью g поступательного движения подвижного состава.
Изменение кинетической энергии подвижного состава на любом участке пути равно работе действующих сил на этом участке пути, т. е. произведению силы на пройденный путь. Следовательно, если равнодействующую всех сил сопротивлений движению, тяги и торможения (так называемую действующую силу) обозначить через FД, то для бесконечно малого перемещения dl подвижного состава получим приращение кинетической энергии
dA=FДdl, (2.6)
Используя выражение (2.5), получим
 (2.7)
(2.7)
Продифференцировав выражение (2.7) и разделив обе части равенства на dl, получим в дифференциальной форме зависимость между скоростью движения v и пройденным путем l:
 или
или  (2.8)
(2.8)
Уравнение (2.8) называют второй формой уравнения движения.
Для получения зависимости между скоростью v и временем t нужно подставить в уравнение (2.8) значение  и сократить на величину dl, тогда
и сократить на величину dl, тогда
 или
или  (2.9)
(2.9)
В результате получается выражение, аналогичное второму закону Ньютона, в которое вместо физической массы входит приведенная масса  . Уравнение (2.9) называют первой формой уравнения движения.
. Уравнение (2.9) называют первой формой уравнения движения.
Размерности величин, входящих в уравнение движения. Так как произвольно можно выбрать единицы измерения только для трех, входящих в уравнения величин, то в правые части уравнений (2.8) и (2.9) необходимо ввести переводные коэффициенты  и
и 
 (2.10)
(2.10)
 (2.11)
(2.11)
Тяговые расчеты удобнее выполнять, используя удельные значения действующей силы и её составляющих.
Для этого делят правую часть уравнений (2.10) и (2.11) на вес подвижного состава и тогда эти уравнения принимают следующий вид:
 (2.12)
(2.12)
 (2.13)
(2.13)
где получаем f Д – удельная действующая сила, Н/кН.

где m – масса подвижного состава;
g – ускорение свободного падения.
Выражения (2.12) и (2.13) будем называть уравнениями движения в удельной форме.
В табл. 2.1. приведены значения коэффициентов и для разных единиц измерения. Первые четыре строки соответствуют рекомендуемым размерностям, содержащим в своей основе СИ. Пятые строки соответствуют размерностям технической системы единиц, которые нередко используются в тяговых расчетах [13].
Таблица 2.1
Значения коэффициентов и для разных единиц измерения
| Урав- нения движения | № п/п | Единицы измерения | Переводные коэффициенты | |||||||
| Массы m | Cилы FД | Удельной силы fД | Време- ни t | Cкоро- сти v | Ускоре- ния  | |||||
| |  | |||||||||
| (2.11) и (2.13) | т т - - - | кН кН - - - | - - Н/кН Н/кН кгс/т | с с с с с | м/с км/ч м/с км/ч км/ч | м/с2 км/(ч*с) м/с2 км/(ч*с) км/(ч*с) | 3,6 0,00981 0,0353 0,0353 | 0,278 28,3 28,3 | ||
| (2.10) И (2.12) | т т - - - | кН кН - - - | Н/кН Н/кН кгс/т | Пути l | Величи- ны |  |  | |||
| м км м км м | м/с км/ч м/с км/ч км/ч | 1/с 1/ч 1/с 1000/ч | 12,96*103 0,00981 0,127 | 0,77*10-5 0,00787 7,87 |
Коэффициент инерции вращающихся частей. Входящий в уравнения движения коэффициент инерции вращающихся частей (1+γ) можно определить как экспериментальным, так и расчетным путем. На практике численное значение γ можно определить, воспользовавшись выражением (2.4).
Момент инерции J каждого тела, входящий в выражение (2.4), представим в виде произведения
J=mчr2ч, (2.14)
где mч – масса вращающейся части;
rч – её радиус инерции.
Тогда эквивалентная масса
 (2.15)
(2.15)
а значение γ = mэ /m.
При вычислении mэ можно исходить из средних значений отношений радиусов инерции r к радиусам R внешних окружностей вращающихся частей. Для движущих и поддерживающих колесных пар и колес r/R равно 0,75-0,80, для зубчатых колес 0,8; для якорей тяговых двигателей 0,65-0,75.
При расчетах достаточную точность дают следующие значения (1+γ) для подвижного состава различных типов:
Тип подвижного состава Коэффициент
(1+γ)*
1.Трамвай:
моторные вагоны 1,09-1,15
прицепные вагоны 1,05-1,08
2.Троллейбусы 1,15-1,20
| * Больше значения (1+γ) справедливы для подвижного состава с двигателями повышенной частоты вращения. |
Величину (1+γ) для подвижного состава, состоящего из моторных вагонов, определяют как средневзвешенное значение по выражению
 (2.16)
(2.16)
где mi- масса i-го однотипного вагона, у которого mэi≠mi=γi
k- число типов вагонов подвижного состава.
Коэффициент инерции вращающихся частей тем больше, чем меньше масса подвижного состава и больше число вращающихся частей, а также их размеры и, следовательно масса. Коэффициент инерции для любого подвижного состава с пассажирами меньше, чем без пассажиров [14].
Экспериментальное определение коэффициента вращающихся частей (1+γ) производят, как правило, методом выбега на горизонтальном участке пути при условии, что известно сопротивление движению W и масса подвижного состава m. Для режима выбега уравнение движения запишется в виде
откуда
С помощью самописца записывается часть кривой выбега v(t) (рис.2.1). Проведя касательную к кривой выбега в точке v1, определяют значение 
Применение уравнения движения. Рассмотрим уравнение движения применительно к различным видам движения подвижного состава. Чтобы привести подвижной состав в движение, к нему нужно приложить силу тяги. Сила тяги подвижного состава F создается установленными на нем тяговыми двигателями. Однако наличие только силы тяги недостаточно для управления подвижным составом, так как она всегда действует в направлении его движения или равна нулю. Для остановки подвижного состава к нему необходимо приложить силу, направленную в сторону, противоположную движению. Она создается тормозными средствами и называется тормозной силой В. Сила тяги F и тормозная сила В являются управляемыми (их может регулировать водитель через аппараты управления). Существуют еще неуправляемые силы. К ним относятся сила тяжести подвижного состава G=mg и все остальные внешние силы (не поддающиеся регулированию), действующие на подвижной состав в направлении его движения или в обратном направлении. Они составляют силы сопротивления движению W.
Положительным направлением для силы тяги F является направление движения подвижного состава, а для тормозной силы В и силы сопротивления движению W - направление, противоположное движению. Равнодействующей всех сил, одновременно приложенных к подвижному составу, является действующая сила
FД=F-W-B, (2.17)
или в удельных величинах
fД=f-w-b, (2.18)
где F/(mg) - удельная сила тяги. Н/кН;
w=W/(mg) - удельное сопротивление движению, Н/кН;
b=B/(mg - удельная тормозная сила, Н/кН;
fД =Fa/(mg) - удельная действующая сила, Н/кН.
Различают три основных режима движения подвижного состава: тяга, выбег и торможение. В режиме тяги к подвижному составу приложены сила тяги F и силы сопротивления движению W:
FД=F-W, (2.19)
В режиме выбега на подвижной состав действуют только силы сопротивления движению W:
FД =-W, (2.20)
В режиме торможения к подвижному составу приложены тормозная сила В и силы сопротивления движению W, тогда действующая сила
FД=-(B+W). (2.21)
На рис.2.1, показаны силы, которые приложены к четырехосному вагону в режиме тяги (точка 0 соответствует центру тяжести вагона).
Интегрируя уравнение движения, можно получить зависимости скорости от пути ν(l), скорости от времени v(t) и времени от пути t (l), которые называются кривыми движения подвижного состава. На рис. 2.2,б, приведены кривые движения и v(t) и v(l) для перегона с неизменным профилем пути. Рассмотрим зависимости v(t), расположенную слева от оси ординат, и v(l), расположенную справа от оси ординат, при движении по характерным участкам.
Режим тяги. Период тяги разделяется на периоды пуска подвижного состава ОА и ОА' и движения по автоматической характеристике АБ и А'Б'. При пуске тяговые двигатели развивают наибольшую силу тяги, которую при неавтоматическом пуске регулирует водитель. Ее следует поддерживать в среднем постоянной. Тангенс угла наклона кривой движения v(t) к оси времени определяет ускорение подвижного состава в данный момент. Если угол наклона отрезка ОА' к оси времени неизменен, то ускорение подвижного состава в момент пуска будет постоянным, а движение равномерно ускоренным.
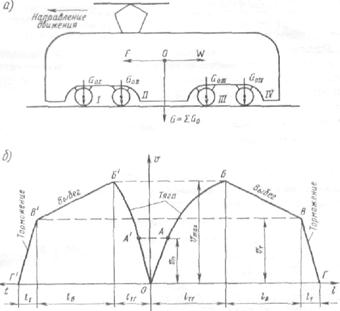
Рис. 2.1. Силы, приложенные к четырехосному моторному вагону
при его движении на прямом горизонтальном участке пути (а) и
кривые движения (б):
1-IV - тяговые электродвигатели; G -сила тяжести вагона: F - сила тяги; GoIV - GoI силы нажатия колесных пар на рельсы; W – силы сопротивления движению
В момент пуска сила тяги всегда больше сопротивления движению (Fп >W), а действующая сила FД=F-W положительна. Точки А и А' на кривой движения соответствуют моменту окончания пуска и выхода на автоматическую характеристику со скоростью vп
В период движения по автоматической характеристике (участки АБ и А'В') характер изменения скорости подвижного состава зависит от значения и направления действующей силы. Если действующая сила положительна Fп >0 (F >W), скорость движения будет возрастать, но медленнее, чем при пуске, так как сила тяги с увеличением скорости уменьшается, а сопротивление движению возрастает. Поэтому на участке АБ (А'Б') скорость возрастает медленнее, чем на участке ОА (ОА'). Точки Б и Б' соответствуют моменту выключения двигателей (тока) и началу выбега [15].
Режим выбега. В период выбега подвижной состав движется по инерции, так как тяговые двигатели отключены, следовательно, ток и сила тяги отсутствуют (I = 0 и F = 0). Кинетическая энергия подвижного состава, накопленная в период движения под током, расходуется на преодоление сил сопротивления движению. Скорость подвижного состава при движении на горизонтальном участке, подъеме и малых спусках постепенно уменьшается (участки БВ и Б'В'), ускорение при этом становится отрицательным. Действующая сила в период выбега будет определяться силой сопротивления движению FД=-W. Точки В и В' соответствуют моменту окончания выбега и началу режима торможения.
Режим торможения. В период торможения создается значительная тормозная сила В, направленная против движения подвижного состава. В результате скорость подвижного состава быстро уменьшается, отрицательное ускорение (тормозное замедление аТ) по абсолютному значению велико. На кривых движения режим торможения определяется отрезками В Г и В' Г', движение при этом равномерно замедленное, vт - скорость начала торможения. Тормозное замедление характеризуется тангенсом наклона отрезка В'Г' к оси времени. Действующая сила при этом будет замедляющей, и будет определяться суммой тормозной силы и силы сопротивления движению [12].
2.2. Реализация сил тяги и торможения
Образование силы тяги. Сила тяги реализуется движущими колесными парами трамвайного вагона или движущими колесами троллейбуса. Движущими называются колесные пары или колеса, которые приводятся во вращение тяговыми электродвигателями.
Из механики известно, что нарушение состояния покоя или изменение скорости движения центра тяжести тела можно совершить только под влиянием внешних сил, действующих на это тело. Следовательно, вращающий момент, развиваемый тяговым двигателем, не может вызвать поступательного движения подвижного состава, так как он обусловлен внутренними силами. Если бы движущее колесо не опиралось на рельсы или на дорогу, оно под воздействием только внутреннего момента не могло бы вызвать поступательного движения подвижного состава. В этом случае движущее колесо вращалось бы около своей геометрической оси, не вызывая поступательного движения подвижного состава.
Для поступательного движения подвижного состава необходимо наличие внешних сил. Такая внешняя сила возникает в результате сцепления движущих колес с рельсами или дорожным покрытием.
Рассмотрим возникновение силы сцепления отдельного колеса (рис. 2.2). Примем, что точка А является точкой опоры колеса на рельс. К колесу будет приложен момент МД, развиваемый тяговым двигателем, увеличенный за счет редуктора тяговой передачи в m раз за вычетом момента сил трения Мтр в подшипниках и передаче и момента вращения Мi,, определяемого инерциями колеса и связанных с ним вращающихся частей. Тогда момент, приложенный к колесу,
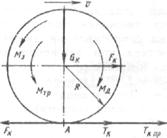
Рис. 2.2. Реализация силы тяги колесом
Мк =МДm - МTP- Мi, (2.22)
где МTP = WобR,
R - радиус колеса;
Wоб - сопротивление движению от трения в подшипниках;

где J - момент инерции вращающихся частей;
 - угловое ускорение.
- угловое ускорение.
Направление движения указано стрелкой v. Представим момент Мк в виде пары сил Fк с плечом, равным радиусу колеса R. Одна из этих сил приложена в точке A от колеса к рельсу и направлена против движения. Она стремится создать скольжение опорной точки колеса относительно рельса в сторону, противоположную поступательному движению. Однако как реакция на эту силу под действием нормального нажатия колеса Gк в опорной точке А возникает благодаря наличию сцепления (трения) с рельсом или дорожным покрытием сила сцепления Тк, Эта сила Тк является реактивной, внешней по отношению к колесу и согласно третьему закону Ньютона равна и противоположна силе Fк т.е. Тк = Fк.
Если сила сцепления Tк не превысит предельной величины Tк пр, то точка А колеса, соприкасающаяся с рельсом или дорогой, окажется как бы неподвижной, т. е. мгновенным центром вращения. Вокруг этой точки под действием вращающего момента начнут поворачиваться все остальные точки колеса. Сила сцепления Tк будет непрерывно перемещать мгновенный центр вращения, а вместе с ним и колесо вдоль пути. В последующие моменты в соприкосновение с рельсом или дорогой будут приходить все новые и новые точки окружности колеса, оказывающиеся мгновенным центром его вращения [16].
Таким образом, в результате возникновения в опорной точке А колеса на рельс или путь внешней силы Tк направленной по касательной к окружности колеса, мгновенный центр его вращения непрерывно перемещается вдоль пути, а геометрический центр 0 получает поступательную скорость v. Приложенная к колесу внешняя сила Tк представляет собой силу сцепления, направленную по касательной к окружности колеса в точке его касания с поверхностью пути, и является силой тяги, вызывающей поступательное движение подвижного состава. Поэтому силу сцепления Tк называют касательной силой тяги на ободе движущего колеса. Силу Fк которая обусловлена вращающим моментом тягового двигателя, называют силой тяги.
При равномерном движении подвижного состава, чему соответствует равномерное вращение колеса (угловая скорость w = const), при отсутствии трения в подшипниках и передаче можно принять Fк = Тк.
При ускоренном или замедленном вращении колеса с учетом трения в подшипниках силы Fк и Тк не будут равны (Fк ≠ Тк), так как действующий на колесо результирующий момент Мк согласно выражению (2.22) равен алгебраической сумме моментов, действующих на колесную пару. Следовательно, соотношение между силами Fк и Тк будет иметь вид
 (2.23)
(2.23)
Это соотношение справедливо для одного колеса. Для подвижного состава соотношение между силой тяги F и силой сцепления T будет иметь вид
 (2.24)
(2.24)
Ограничение силы тяги. Сила тяги ограничивается предельно допустимой силой сцепления, имеющей природу сил трения. Если этот предел будет превышен, произойдет срыв сцепления. Движущие колеса начнут скользить относительно пути в точке касания А. При этом их угловая скорость w¢ будет больше угловой скорости w, соответствующей поступательной скорости v, на значение угловой скорости скольжения wск колес по рельсам w¢ = w+ wск. Начнется буксование колес, при котором происходит повышенный износ бандажей (или шин) к пути.
По мере увеличения скорости скольжения сила сцепления колеса с поверхностью качения резко уменьшается, что приводит к чрезмерному увеличению частоты вращения двигателя. Это в свою очередь вызывает дальнейший рост скорости скольжения и соответственно снижение силы сцепления. Нормальное качение колеса становится невозможным. Поэтому при буксовании подвижного состава на тяжелых подъемах или скользкой дороге он останавливается и иногда не может тронуться с места вследствие вновь возникающего буксования. В этом случае нарушение сцепления может вызвать задержку движения. Восстановить сцепление колес с рельсами можно, увеличив силу сцепления, например, путем подсыпки песка.
Следовательно, для предельной силы сцепления всего подвижного состава по выражению (2.24) получим следующее ограничение;
 (2.25)
(2.25)
откуда наибольшая допустимая по условию сцепления сила тяги
 (2.26)
(2.26)
Величины å Wоб и å  малы по сравнению с величиной Тпр. Так, для трамвая типа РВЗ-6 при силе тяги Fmax = 25 кН значение å Wоб и å +å Wоб не превышает 1 кН.
малы по сравнению с величиной Тпр. Так, для трамвая типа РВЗ-6 при силе тяги Fmax = 25 кН значение å Wоб и å +å Wоб не превышает 1 кН.
Приближенно можно принять для подвижного состава
Fmax £Tпр, (2.27)
Силу сцепления определяют, как произведение силы нажатия Gк колеса на рельс и коэффициента сцепления jк колеса с рельсом, т. е.
Tк= Gк jк, (2.28)
Если измерять нажатие колеса на рельс Gк в килоньютонах то чтобы получить силу сцепления Tк в ньютонах, в правую часть выражения (2.28) необходимо ввести коэффициент, равный 1000. Следовательно, сила сцепления, Н,
Тк = 1000 Gк jк, (2.29)
Тогда для всего подвижного состава выражение (2.30) примет вид;
Fmax £1000 Gсц j или Fmax¢ £ 1000 mсц g j, (2.30)
где Fmax - наибольшая допустимая по условиям сцепления сила
тяги подвижного состава. Н;
Gсц = mсц g- сцепной вес (сумма сил нажатия всех движущих осей
подвижного состава), кН;
mсц - сцепная масса подвижного состава, т;
g - ускорение свободного падения, м/с2.
При движении на горизонтальном участке сцепной вес
или
Gcц=zGосц, если G01=G02=…=Goz=Gосц ,
где z - число движущих осей подвижного состава;
Gосц - вес, приходящийся на одну движущую ось.
Например, для двухосных троллейбусов сцепной вес - это вес, приходящийся на задние колеса. На уклонах сцепной вес подвижного состава уменьшается, так как сила нажатия движущих осей на путь будет определяться равенством
Gоц=Gcosa,
где a - угол уклона.
Образование тормозной силы.
Определим условие нормального качения колеса при торможении. В период торможения к поезду приложена тормозная сила. Рассмотрим процесс образования этой силы на примере одного колеса (рис. 2.3).
В тормозном режиме на каждую колесную пару вагона, движущегося и направлении, указанном стрелкой v, действует тормозной момент МТ, направленный против часовой стрелки. В этом же направлении будет приложен момент МТР, определяемый внутренним сопротивлением в подшипниках. Момент М J, определяемый инерциями колеса и связанных с ним вращающихся частей, будет направлен по часовой стрелке. Результирующий момент М будет равен алгебраической сумме моментов, действующих на колесную пару,
М = МТ-МJ + МТР, (2.31)
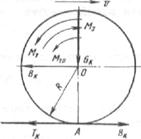
Рис.2.3. Реализация тормозной силы колесом
Представим тормозной момент парой сил Bк, приложенных соответственно в точках О и А. Если бы колеса вращались свободно, не касаясь рельсов или дороги, т. е. были приподняты над уровнем пути, то под действием тормозного момента они бы остановились. В действительности колеса опираются па рельсы или путь, следовательно, в точке соприкосновения А возникает сила сцепления Тк. Поэтому колеса не останавливаются, а продолжают катиться, но пути, одновременно как бы упираясь в него под действием тормозного момента.
Таким образом, под действием тормозной силы Bк в результате сцепления колеса с рельсом в точке А образуется внешняя сила Тк, направленная противоположно силе Bк. Точка А в каждый момент является как бы неподвижной, т. е. мгновенным центром вращения.
В целом на подвижной состав действует сумма тормозных сил всех колес, которые можно заменить их равнодействующей. Условно эту равнодействующую можно считать приложенной к центру тяжести подвижного состава. При движении колеса силы Вк и Тк не будут равны, так как действующий на колеса результирующий момент М равен согласно выражению (2.31) алгебраической сумме моментов. Следовательно, соотношение между силами Вк и Тк для одной оси будет иметь вид
 (2.32)
(2.32)
и для всего подвижного состава [11]
 (2.33)
(2.33)








