 2015-04-01
2015-04-01 1682
1682Зависимость Wо тр от скорости движения. В результате экспериментальных исследований была установлена
зависимость составляющей основного сопротивления движению, обусловленной силами трения Wо тр от скорости движения и (рис.2.9), которую можно представить в виде
Wо тр =А+Вv. (2.46)
где A и В - постоянные, которые зависит от конструкции буксы, конструкции пути и
типа колесной пары.
Если движение начинается с нулевой скорости, то при низких скоростях наблюдаются высокие значения основного сопротивления движению от трения, это явление объясняется выдавливанием смазки как в буксах с подшипниками качения, так и в буксах с подшипниками скольжения. В последних начальное значение сопротивления движению от трения значительно выше.
При расчетах увеличением основного сопротивления движению при v = 0 пренебрегают, так как в эксплуатации оно преодолевается за счет значительного запаса силы тяги, которым обладает, как правило, подвижной состав городского электрического транспорта (ГЭТ).
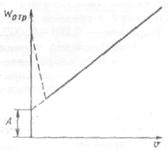 |
Рис. 2.9. Зависимость Wотр (v)
Сопротивление воздушной среды Wо пр. При движении подвижной состав испытывает сопротивление воздушной среды. При этом, с одной стороны, происходит непосредственное трение воздуха о наружные поверхности подвижного состава. С другой стороны, воздушные массы получают ускорение от лобовой и хвостовой поверхностей поезда, а также от неровностей его боковых поверхностей, Массы воздуха получают ускорение и накапливают кинетическую энергию, которая в дальнейшем расходуется на трение между отдельными слоями воздуха.
Аэродинамическими исследованиями движения тела неизменяемой формы в воздухе установлено, что при постоянной скорости движения составляющая основного сопротивления Wо аэр приблизительно пропорциональна произведению квадрата скорости на площадь поперечного сечения подвижного состава S:
Wо аэр = Сх Sv2, (2.47)
где Сx - коэффициент обтекаемости, который определяется, как правило, опытным
путем.
Для подвижного состава небольшой длины характерным размером S является наибольшая площадь поперечного сечения кузова головного вагона.
Как показали проведенные исследования, от формы движущегося тела при одной и той же площади его поперечного сечения существенно зависит сопротивление воздушной среды. Путем изменения формы кузова можно в значительной степени снизить коэффициент обтекаемости. Этим самым можно уменьшить сопротивление движению и, следовательно, расход электрической энергии.
Следует отметить, что составляющая Wо аэр при относительно низких скоростях движения (до 40 - 50 км/ч) мала по сравнению Wо тр. Поэтому на городском транспорте обтекаемые формы (с хорошей аэродинамикой) придают только скоростному подвижному составу.
Для подземных линий метрополитена условия взаимодействия подвижного состава и воздушной среды отличаются от условий для наземного транспорта. Двигаясь в тоннеле, поезд выталкивает воздух подобно поршню в насосе. При этом перед поездом возрастает давление воздуха, а позади его образуется разрежение. Одновременно воздух перемешается навстречу движению поезда по зазору между ним и стенками тоннеля, что создает относительно большое сопротивление движению, даже при низких скоростях движения.
Для подземных линий метрополитена сопротивление от взаимодействия поезда и воздушной среды в тоннеле является составляющей основного сопротивления движению. Для наземного городского транспорта сопротивление воздуха в тоннеле относится к дополнительному сопротивлению движения [5].
На рис. 2.10 представлена зависимость сопротивления воздушной среды от скорости движения Wо аэр (v) для трамвайного вагона и троллейбуса.
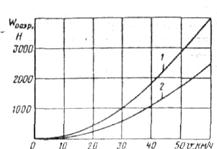 |
Рис. 2.10. Зависимость Wо аэр (v) для трамвая (1) и троллейбуса (2)
Формулы для определения основного сопротивления движению.
Структура расчетных зависимостей основного сопротивления движению. На основное сопротивление движению влияют многие разнообразные постоянные и переменные факторы, взаимосвязанные и зависящие друг от друга. Поэтому определение основного сопротивления движению аналитическим путем очень сложно и весьма неточно. В результате экспериментальных исследований установлено, что определяющее влияние на основное сопротивление движению рельсового транспорта оказывают два фактора: скорость движения и сила нажатия колесной пары на рельсы. С увеличением скорости основное удельное сопротивление движению растет, с увеличением силы нажатия колесной пары на рельсы оно уменьшается.
При практических расчетах основного удельного сопротивления движению применяют эмпирические формулы вида
w0 = a+bv+cv,2 (2.48)
где a, b и c - постоянные числовые коэффициенты, получаемые опытным путем и отражающие влияние различных факторов на основное сопротивление движению.
Коэффициенты а и b характеризуют силы трения, определяемые конструкцией подвижного состава, коэффициент с - сопротивление воздушной среды. Каждому типу подвижного состава соответствуют разные значения коэффициентов а, b и с. Для подвижного состава небольшой длины коэффициент b можно принять равным нулю.
Сопротивление движению в режимах тяги, выбега и торможения. Для моторных вагонов рассматривают зависимости основного сопротивления движению в режиме тяги или электрического торможения, т. е. движении, когда тяговые двигатели обтекаются током (движение под током) и в режиме выбега.
При движении под током силы сопротивления движению, обусловленные механическими потерями в тяговых двигателях, тяговой передаче, моторно-осевых подшипниках, учтены в электромеханических характеристиках тяговых двигателей. Поэтому при движении под током расчетное сопротивление движению меньше, чем в режиме выбега и механического торможения на значение сил, которые вызываются этими потерями.
В реальных условиях эта разница вызвана тем, что при движении под током потери энергии в тяговых двигателях, тяговой передаче, подшипниках, которые учитываются в характеристиках двигателей, покрываются энергией, потребляемой из контактной сети. При движении в режиме выбега на покрытие этих потерь расходуется кинетическая энергия, накопленная подвижным составом, и эти потери учитываются увеличением сопротивления движению на значение ∆w0.
На рис.2.11 приведены зависимости основного удельного сопротивления при движении под током w0 и без тока (при выбеге) w0x . от скорости движения.
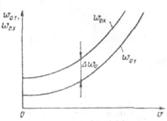 |
Рис.2.11. Зависимость основного удельного сопротивления движению под током и без тока от скорости.
2.3.3. Сопротивление движению от уклона
Когда подвижной состав движется по прямолинейному уклону, то, помимо горизонтального, он совершает вертикальное перемещение. Составляющая силы тяжести, направленная по движению подвижного состава, зависит от крутизны пути и является силой сопротивления движению от уклона Wi (рис.2.12).
Уклон профиля пути, выраженный в тысячных долях
i=1000tga, (2.49)
где согласно (рис.2.12.)
 (2.50)
(2.50)
здесь hк и hн — высоты соответственно в конце и начале уклона, м;
l - длина рассматриваемого участка пути с уклоном, м.
Подставляя выражение (2.50) в выражение (2.49), получим, ‰,
 . (2.51)
. (2.51)
Следовательно, уклон, выраженный в ‰. - это число метров высоты, приходящихся на 1 км горизонтальной длины пути. Сопротивление движению подвижного состава от уклона, кН,
Wi =mgsina, ( 2.52)
где m - масса поезда, т;
g - ускорение свободного падения, м/с2.
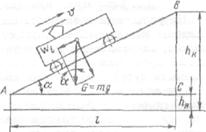
Рис.2.12. Определение сопротивления движению от уклона Wi
На реальном профиле пути подъемы не превышают 2-2,5°, поэтому можно принять, что sina ≈tga. Тогда сопротивление движению от уклона, кН,
Wi =mgtga =mg  (2.53)
(2.53)
или, Н,
Wi =mgi, (2.54)
Удельное сопротивление движению от уклона, Н/кН,
wi =mgtga. (2.55)
Как следует из выражения (2.55), удельное сопротивление движению от уклона численно равно уклону в тысячных долях и не зависит ни от скорости, ни от типа подвижного состава. Формула (2.55) выведена при движении на подъеме. Но она будет справедлива и для движения на спуске. На спуске составляющая силы тяжести направлена по движению подвижного состава и является ускоряющей силой. Это учитывается в формуле (2.55) тем, что на спусках значение уклона / является отрицательным.
Если подвижной состав движется на подъеме с i=10‰. nо wi =10 Н/кН, на спуске такой же крутизны (i = -10‰) wi = - 10 Н/кН. Таким образом, в формуле (3.55) под i понимается не абсолютное, а алгебраическое значение крутизны уклона.
На городском рельсовом транспорте уклоны достигают 20-40 ‰. На маршрутах безрельсового транспорта встречаются уклоны до 80 ‰.
2.3.4. Сопротивление движению от кривой
На рельсовом транспорте колеса на одной оси жестко связаны между собой. Поэтому при движении в кривых колеса, закрепленные на одной оси, совершают неодинаковый путь. Чем меньше радиус кривизны, тем больше разность путей, проходимых колесами одной оси.
Однако жестко спаренные колеса вращаются с одинаковой скоростью. Вследствие этого скорости колес по кругам качения оказываются не равными скоростям их перемещения вдоль рельсов, т. е. возникает проскальзывание колес относительно рельсов, поэтому колеса с внутренней стороны кривой окажутся в режиме буксования или наружные колеса- в режиме юза.
При прохождении подвижным составом кривых участков, помимо вышеназванного явления, возникает много дополнительных, имеющих сложный характер и увеличивающих сопротивление движению.
Например, наиболее значительным является трение реборды о боковую поверхность головки рельса. В процессе эксплуатации для уменьшения износа рельса и реборд колесных пар боковые поверхности рельсов па кривых участках пути смазывают.
В результате экспериментальных исследований были
получены выражения, которые учитывают основные факторы, влияющие на значение удельного сопротивления движению от кривых. Наиболее распространенное выражение имеет вид:
 , (2.56)
, (2.56)
где φ - коэффициент трения скольжения между колесом и рельсом;
D - диаметр колеса, м;
lв - длина жесткой базы, м;
d - ширина колеи м;
Rкр - радиус кривой, м.
На практике пользуются усредненными величинами.
В этом случае для трамвайных вагонов удельное сопротивление движению от кривой, Н/кН,
wкр = 450/Rкр. (2.57)
На безрельсовом транспорте сопротивление движению, на кривых участках увеличивается незначительно благодаря тому, что колеса не связаны жестко между собой, и этой величиной практически можно пренебречь.
2.3.5. Дополнительное сопротивление движению
Дополнительное сопротивление движению WД возникает под воздействием ветра, при движении подвижного состава в тоннеле, при низкой температуре окружающего воздуха.
Сопротивление движению при ветре отличается от сопротивления движению при безветренной погоде. Направление ветра может совпадать или быть противоположным направлению движения подвижного состава. Когда ветер направлен по движению подвижного состава, результирующая скорость воздуха равна разности скоростей подвижного состава v и ветра vв. Если ветер направлен против движения, результирующая скорость подвижного состава относительно воздуха будет равна сумме скоростей подвижного состава и ветра. Это обстоятельство можно приближенно учесть непосредственно в формулах для определения основного сопротивления движению путем подстановки в член, содержащий v2 вместо v величину v± vв.
В условиях города из-за экранирующего действия домов ветра с большой скоростью практически не бывает, поэтому увеличение сопротивления движению от ветра в городском электрическом транспорте сказывается незначительно, и в тяговых расчетах его не учитывают.
Дополнительное сопротивление движению подвижного состава в тоннелях возникает за счет увеличения сопротивления воздуха. Двигаясь в тоннеле, подвижной состав выталкивает воздух подобно воздушному поршню. При этом перед подвижным составом возрастает давление воздуха, а позади образуется разряжение. Для наземного городского электрического транспорта сопротивление воздуха в тоннелях в тяговых расчетах не учитывается, так как тоннели встречаются крайне редко и имеют небольшую длину.
Дополнительное сопротивление движению при трогании подвижного состава с места возникает в момент перехода из состояния покоя в состояние движения. Оно обусловлено главным образом увеличением сил трения в буксах, которые зависят при определенном качестве смазки от температуры окружающего воздуха и длительности стоянки, массы подвижного состава, типа подшипников, Как уже указывалось ранее, на городском электрическом транспорте дополнительное сопротивление движению при трогании с места не учитывается.
На сопротивление движению оказывает влияние температура окружающею воздуха. В холодное время увеличивается плотность воздуха, в результате чего возрастает сопротивление воздушной среды и, следовательно, основное сопротивление движению. Температура воздуха оказывает большое влияние на силы трения в подшипниках. В холодное время смазка в буксах загустевает, увеличиваются силы внутреннего трения в подшипниках. Влияние этого обстоятельства можно уменьшить путем применения в зимнее время менее вязких смазочных материалов.
2.3.6. Пути уменьшения сопротивления движению
Сопротивление движению подвижного состава оказывает существенное влияние на расход электрической энергии. Следовательно, вопрос о снижении сопротивления движению имеет большое практическое значение.
Все способы уменьшения сопротивления движению можно разделить на две основные группы: конструктивные и эксплуатационные. К конструктивным мерам относятся:
- уменьшение массы тары подвижного состава;
- увеличение радиуса кривых, создание бесстыковых («бархатных») путей;
- широкое применение современных типов роликовых подшипников.
К эксплуатационным мерам относятся:
надлежащее содержание верхнего строения путей, систематическое регулирование тормозов, устраняющее трение колодок о бандажи при отпущенных тормозах;
своевременное добавление смазки в подшипники, применение качественной смазки, тщательный подбор по сезонам оптимальных сортов смазочных материалов для уменьшения потерь энергии в редукторах и буксовых подшипниках;
- смазывание реборд рельсов на кривых участках пути;
- поддержание необходимого давления в пневматических колесах, регулирование углов развала и схождения колес для троллейбуса;
- сокращение времени стоянок с целью облегчения условий трогания подвижного состава, особенно в зимнее время [12].
3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ И ТЯГОВЫЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА ПОСТОЯННОГО ТОКА
3.1. Характеристики на валу тягового двигателя постоянного тока
Электрические машины постоянного тока могут иметь различные способы возбуждения: последовательное, параллельное, смешанное или
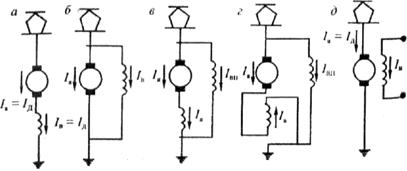 |
Рис. 3.1. Схемы электродвигателей с различным включением обмоток возбуждения:
а - последовательным; б - параллельным; в и г- смешанными соответственно с согласным и встречным включением параллельной и последовательной обмоток возбуждения; д - независимым
независимое (рис. 3.1). В зависимости от способа возбуждения машины обладают разными электромеханическими характеристиками на валу шагового элект-9одвигателя называют зависимость частоты крашения якоря, вращающею момента и коэффициента полезного действия от потребляемого тока при неизменном напряжении и постоянной температуре обмоток Б изоляцией класса В 115 °С, а с изоляцией классов Р и Н - 130 °С (по ГОСТ 2582 -81*). Характеристики тяговых двигателей электроподвижного состава переменного тока привода при изменяющемся направлении в соответствии с внешней характеристикой преобразователя. Электромеханические характеристики снимают при стендовых испытаниях тяговых электродвигателей на за воде-изготовителе и приводят в виде графиков или таблиц. Усредненные характеристики по испытаниям первых 10 двигателей называют типовыми характеристиками.
Чтобы определить зависимость частоты вращения якоря от тока,
нужно рассмотреть электрическую цепь тягового электродвигателя (рис. 3.2). При установившемся режиме работы подведенное к нему напряжение уравновешивается электродвижущей силой (ЭДС), наводимой в обмотке якоря, и падением напряжения в обмотках
UД = Е + IД r. (3.1)
где UД - напряжение на тяговом электродвигателе, В;
Е - электродвижущая сила. В;
IД - ток тягового электродвигателя. А;
r - сопротивление обмоток тягового электродвигателя. Ом.

Рис.3.2. Схема включения тягового электродвигателя.
ЭДС тягового электродвигателя наводится за счет перемещения проводников обмотки якоря в магнитном поле. Она пропорциональна, на магнитному потоку и частоте вращения якоря, а также включения конструктивных особенностей тягового электродвигателя:

где p - число пар полюсов;
n - частота вращения якоря, об/мин;
N - число активных проводников обмотки якоря;
Ф - магнитный поток главного полюса, Вб;
a - число пар параллельных ветвей обмотки якоря.
Величину  - называют конструктивной постоянной тягового двигателя. Тогда ЭДС можно определить как
- называют конструктивной постоянной тягового двигателя. Тогда ЭДС можно определить как
Е = Сn nФ, (3.2)
Подставив значение Е в уравнение (3.1), получают
UД = Сn nФ + Iд r, (3.3)
 (3.4)
(3.4)
Таким образом, частота вращения тягового электродвигателя при постоянных значениях подведенного напряжения UД сопротивления обмоток r и конструктивной постоянной Сn зависит от тока IД и магнитного потока Ф. Магнитный поток тягового электродвигателя, не имеющего компенсационной обмотки, зависит от тока возбуждения Iв, тока якоря Iя, конструкции двигателя и материалов магнитопровода [18].
Зависимость магнитного потока от тока возбуждения называют магнитной характеристикой тягового электродвигателя. На практике вместо магнитного потока используют пропорциональные ему величины  в зависимости от тока возбуждения Iв.
в зависимости от тока возбуждения Iв.
Если тяговый электродвигатель не имеет компенсационной обмотки, то ток якоря под действием реакции якоря вызывает снижение магнитного потока. Поэтому зависимость Сn Ф от тока возбуждения Iв при разных токах якоря Iя представляет собой семейство кривых (рис. 3.3). Чем больше ток якоря Iя, тем ниже располагаются кривые Сn Ф (Iв). Эти кривые называют
магнитными характеристиками при нагрузке или нагрузочными характеристиками [19].
В зоне малых токов Iв кривые близки к прямым и магнитный поток возрастает почти пропорционально току. Затем из-за насыщения магнитной системы темп роста магнитного потока замедляется. На этом же рисунке показана штриховая линия Сn Ф (Iв) при последовательным возбуждении машины, когда Iв = Iя,.
Если в тяговом электродвигателе есть компенсационная обмотка, то ее действие почти полностью компенсирует реакцию якоря, длинный поток практически не зависит от тока якоря и определяется только током возбуждения. Магнитная характеристика такого электродвигателя при полной компенсации потока якоря представляет одну кривую при токе Iя, = 0.
Нагрузочные характеристики можно использовать для расчета и построения электромеханических характеристик на валу тягового двигателя n(IД,) по формуле (3.4), а также вращающего момента M (IД).
Зависимость вращающего момента, Н*м, от тока тягового электродвигателя IД и магнитного потока Ф выражается формулой
М=9,55 Сn Ф (IД) -∆М, (3.5)
где ∆М - момент, возникающий вследствие механических и магнитных потерь в электродвигателе, Н*м:
 (3.6)
(3.6)
здесь ∆Рмех и ∆Рмагн - соответственно мощность механических и магнитных потерь,
Вт, которые рассмотрены ниже;
n- частота вращения, об/мин.
Вращающий момент без учета магнитных и механических потерь называют электромагнитным вращающим моментом;
Мэм=9,55 Сn Ф IД . (3.7)
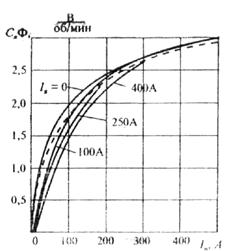
Рис. 3.3. Нагрузочные характеристики тягового электродвигателя
Формулы (3.5) - (3.6) используют для расчета и построения, кривых n(IД) и М (IД) при проектировании тяговых электродвигателей. Используя формулу (3.5), определяют частоту вращения при заданном напряжении Uд и известных значениях конструктивной постоянной электродвигателя Сn и сопротивления его обмоток r для каждого тока IД, а также соответствующего ему тока возбуждения Iв. Затем по формуле (3.6) при известных значениях механических и магнитных потерь вычисляют ∆М для каждых скорости v и тока IД. Вращающий момент М рассчитывают по формуле (3.5) для каждого тока /д. Обычно определяют 8-10 точек и наносят их на графики. На рис.3.4 приведены для примера электромеханические характеристики на валу тягового двигателя последовательного возбуждения.
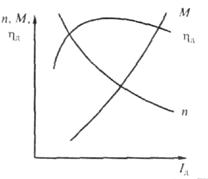
Рис. 3.4. Электромеханические характеристики тягового электродвигателя последовательного возбуждения
В тяговом электродвигателе происходит преобразование подведенной к нему электрической энергии в механическую, расходуемую на движение поезда. При этом часть энергии теряется. Общая мощность потерь АР1 складывается из отдельных составляющих:
∆P1=∆Рм+∆Рщ+∆Рмех+∆Рмагн+∆Рдоб , (3.8)
где ∆Рм - мощность потерь в меди обмоток;
∆Рщ - переходные потери в месте контакта щеток;
∆Рмех - механические потери;
∆Рмагн - магнитные потери при холостом ходе;
∆Рдоб - добавочные потери при нагрузке.
Потери в меди обмоток ∆Рм вызываются тепловым действием тока при его прохождении по проводникам обмоток якоря, главных и дополнительных полюсов и компенсационной обмотки:
∆Рм=åI2ri,
где I - ток, проходящий по обмотке, А;
ri - сопротивление i -й обмотки, Ом.
Переходные потери в щеточном контакте ∆Рщ возникают в местах контакта щеток и коллектора. По ГОСТ 2582 - 81* эти потери определяют из расчета падения напряжения ∆Uщ, равного 3 В для щеток положительной и отрицательной полярности в том случае, когда у них нет гибких шунтов, и равного 2 В при использовании щеток с шунтами:
∆Рщ=∆Uщ I.
За счет потерь в меди обмоток и местах контакта щеток уменьшается значение числителя дроби в формуле (3.4), а следовательно, снижается частота вращения тягового электродвигателя. На значение вращающего момента эти потери не влияют.
Механические потери ∆Рмех возникают из-за трения вала в моторно-якорных подшипниках, щеток о коллектор, якоря о воздух. У двигателей с самовентиляцией добавляются потери из-за вращения лопастей встроенного в машину вентилятора, прогоняющего охлаждающий воздух через электродвигатель. Эти потери возрастают с увеличением частоты вращения, а от тока двигателя зависят незначительно [20].
Магнитные потери при холостом ходе ∆Рмагн складываются из потерь на гистерезис и потерь от вихревых токов в сердечнике и зубцах якоря тягового электродвигателя. Они возрастают с увеличением магнитного потока и частоты вращения якоря, т.е. частоты перемагничивания стали.
Добавочные потери при нагрузке ∆Рдоб добавляются к основным магнитным потерям. Они возникают вследствие искажения основного магнитного потока, наведения вихревых токов в полюсных наконечниках, неравномерного распределения токов по сечениям шин и щеток, возникновения токов в уравнительных соединениях. Все эти потери возрастают с увеличением нагрузки электродвигателя. ГОСТ 2582-81* рекомендует добавочные потери определять в зависимости от тока нагрузки по табл. 3.1.
Таблица 3.1
Таблица для определения добавочных потерь от тока нагрузки
| Ток нагрузки в % от номинального | |||||||
| Добавочные потери ∆Рдоб в % от магнитных потерь при холостом ходе ∆Рмагн |
Сумму механических и магнитных потерь называют потерями холостого хода ∆Рхх и приводят в виде графиков в зависимости от частоты вращения n (рис.3.5). Нижняя кривая показывает механические потери, последующие — сумму механических и магнитных потерь при разных токах возбуждения /в.
Коэффициент полезного действия (КПД) тягового электродвигателя hД определяют как отношение отдаваемой мощности Р2 к подведенной мощности Р1:
 (3.9)
(3.9)
При известных потерях ∆Р1 отдаваемая мощность
Р2=Р1-∆Р1,

