 2015-04-01
2015-04-01 1076
1076Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил.
Под силой понимается мера механического взаимодействия материальных тел, в результате которого тела могут изменять движение или деформироваться (изменять форму). Сила является векторной величиной. Она характеризуется числовым значением или модулем, точкой приложения и направлением. Прямая, проходящая через точку приложения силы и совпадающая с ее направлением, называется линией действия силы. Вектор силы принято обозначать латинской буквой с символом вектора - чертой сверху. Модуль вектора будем обозначать той же буквой, но без символа вектора. На рис. 1.1  – вектор силы, А – точка приложения, LM – линия действия.
– вектор силы, А – точка приложения, LM – линия действия.
В международной системе единиц измерения физических величин (СИ) за единицу измерения модуля силы принят ньютон (Н).

Рис. 1.1
В некоторых случаях на тело действует распределенная нагрузка. Распределенная нагрузка задается интенсивностью. Интенсивность нагрузки равна отношению силы, приходящейся на предельно малую часть линии, поверхности или объема тела в окрестности данной точки, к площади этой части линии, поверхности или объема тела. Соответственно размерность интенсивности в системе СИ: Н/м, Н/м2 или Н/м3.
Проекцией силы (как и любого другого вектора) на ось называется алгебраическая величина, равная произведению модуля силы на косинус угла между силой и положительным направлением оси.
Если этот угол острый, проекция положительна, если тупой –отрицательна, если прямой – равна нулю. Геометрически проекцию силы на ось можно интерпретировать как взятую с соответствующим знаком длину отрезка, отсекаемого от оси перпендикулярами, опущенными из начала и конца вектора силы (рис. 1.3).
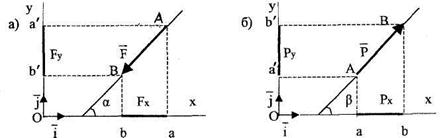
Рис. 1.2
Так, для сил, изображенных на рис. 1.2, будем иметь
Fx =Fcos(π -α) = -Fcosa; Fy = F cos ( + α)=-Fsinα;
+ α)=-Fsinα;
Px=P cos β; Py=Pcos( -β) = Psinβ.
Проекцией силы на плоскость называется вектор, ограниченный перпендикулярами, опущенными из начала и конца вектора силы на заданную плоскость. Проекцию вектора на координатную плоскость принято обозначать той же буквой латинского алфавита, что и вектор силы, с двойным нижним индексом соответственно наименованию осей, через которые проходит плоскость (рис. 1.3).
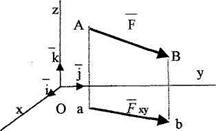
Рис. 1.3
Вектор может быть определен не только через модуль и направление в пространстве, но и через проекции на оси декартовой системы координат.
 =
=  Fx+
Fx+  Fy+
Fy+  Fz,
Fz, 
где , , – орты (единичные вектора), определяющие направление осей координат; Fx,Fy,Fz – проекции силы на соответствующие координатные оси.
Совокупность сил ( 1, 2,... n), действующих на какую-либо механическую систему, в частности, твердое тело, называется системой сил. Символически система сил обозначается (
1, 2,... n), действующих на какую-либо механическую систему, в частности, твердое тело, называется системой сил. Символически система сил обозначается ( ).
).
Система сил, которая, действуя на свободное твердое тело, находящееся в покое, не сообщает ему никакого движения, находится в равновесии, или, иначе говоря, эквивалентна нулю.
Если направления всех сил какой-либо системы () изменить на противоположные, сохраняя точки их приложения, то получается система сил ( '), которая называется противоположной системе (). Символически это обозначается так:
( ') = (- ).
Если две системы сил ( 1) и ( 2), действующие одновременно на свободное твердое тело, находятся в равновесии, то говорят, что система сил ( 1) уравновешивает систему сил ( 2), и наоборот.
Если система сил ( 1) уравновешивается системой сил, противоположной системе ( 2), то системы сил ( 1) и ( 2) называются эквивалентными. Символическое обозначение ( 1)~ ( 2).
В том случае, когда система сил () эквивалентна одной силе R, то есть
() ~  ,
,
последняя называется равнодействующей данной системы сил. Не всякая система сил имеет равнодействующую.
Если все силы, действующие на твердое тело, образуют систему сил, находящуюся в равновесии, то говорят, что и само тело находится в равновесии.
Из последнего определения следует, что под состоянием равновесия твердого тела (а в дальнейшем и механической системы) мы будем понимать те состояния, которые тело может иметь под действием уравновешенной системы сил, т.е. состояние покоя или инерциального движения; какое именно из этих состояний имеет место, с точки зрения задач, рассматриваемых в статике, несущественно.
Силы, действующие на данное тело или механическую систему, можно разделить на внешние и внутренние. Внешними называются силы, которые действуют на это тело или механическую систему со стороны других тел или точек, не входящих в данную систему, а внутренними – силы, с которыми части данного тела (или точки данной системы) действуют друг на друга.

