 2015-04-01
2015-04-01 1244
1244Работу любого двигателя внутреннего сгорания необходимо контролировать. Поэтому двигатель снабжается различного рода устройствами автоматического регулирования, управления, пуска, останова и др. Многие из них работают в режиме автоматического поддержания заданных значений отдельных регулируемых параметров (частоты вращения, температуры охлаждающей воды, давления наддува и др.). Другие - обеспечивают автоматическое управление работой узлов двигателя (системы автоматизации пуска и остановки, контроля и защиты, а также системы автоматизации агрегатов обслуживания, электронное управление впрыском топлива). Такие устройства необходимо проектировать, конструировать, испытывать, и это справедливо не только для ДВС, но практически для всех технических систем. Поэтому с течением времени была сформирована инженерно-техническая дисциплина «Теория автоматического регулирования и управления», некоторые фрагменты которой (применительно к двигателям внутреннего сгорания) представлены ниже.
В самом простом варианте системы автоматизации между собой взаимодействуют, по крайней мере, два элемента. Одним из них является сам двигатель как объект автоматического регулирования или управления, другим - устройство, обеспечивающее такую автоматизацию. Если это устройство предназначено для поддержания на заданном уровне значения регулируемого параметра, то такое устройство называется автоматическим регулятором, а совокупность двигателя и автоматического регулятора - системой автоматического регулирования (САР).
Совокупность двигателя, как объекта автоматического управления, с прибором или комплексом приборов, осуществляющих процесс автоматизации управления, называется системой автоматического управления (САУ).
Обычно для решения задач управления и регулирования двигателя не рассматривается его внутренняя структура, но необходимо четко определять, что является его входными параметрами и выходными характеристиками. Тогда взаимодействие элементов в системах автоматического регулирования и управления наглядно иллюстрируются функциональными схемами, в которых каждый элемент изображается прямоугольником, а взаимодействие элементов показывается стрелками.
 |
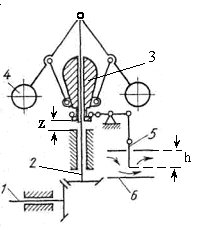 |
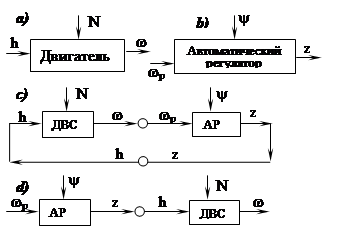
Рис.1.1. Функциональные схемы: а) двигателя; b) регулятора c) системы регулирования d) системы управления
Рис.1.2. Схема автоматического регулятора Уатта. 1- вал машины; 2- валик регулятора; 3- муфта; 4- грузы; 5- заслонка; 6- патрубок
Так, например, двигатель внутреннего сгорания (рис. 1.1, а) может работать на заданном скоростном режиме (ω = const) при заданной нагрузке (настройке потребителя N = const) при условии определенной цикловой подачи топлива gц и, следовательно, при определенном положении h органа управления (рейки, дроссельной заслонки). Для поддержания регулируемого параметра ω на заданном уровне при смене нагрузки необходимо воздействовать на орган управления с целью изменения gц.
Для решения этой задачи используется автоматический регулятор, воспринимающий воздействие со стороны двигателя в виде изменения угловой скорости ωр валика 1(см. рис. 1.1, b; и 1.2). Следовательно, для двигателя ωр - выходная координата (стрелка от двигателя, см. рис. 1.1, а), а для автоматического регулятора ωр - входная координата (рис. 1.1, b). Значение ωр определяет положение z муфты 3 и положение h органа управления 5 двигателем (см. рис. 1.1, b и 1.2). Таким образом, положение z муфты - выходная координата регулятора. Во многих случаях регулятор дает возможность устанавливать желаемый скоростной режим или изменять его путем смены настройки ψ регулятора, поэтому ψ также является внешним воздействием - входной координатой регулятора (см. рис. 1.1, b).
Используя функциональные схемы элементов можно составить функциональную схему САР, в которой выходное воздействие одного элемента является входным для другого элемента так, что вся цепь взаимодействия замкнута (Рис. 1.1, c). Это замыкание в САР должно осуществляться таким образом, чтобы автоматический регулятор АР воздействовал на двигатель ДВС в направлении восстановления нарушенного режима работы. Так, например, при увеличении ω цикловая подача топлива должна уменьшаться, а при уменьшении ω – увеличиваться. Такое взаимодействие двигателя и регулятора в САР обеспечивается главной отрицательной обратной связью. Положение z муфты автоматического регулятора (Рис. 1.2) кинематически жестко связано с положением h органа управления, например по формуле:
h = h0 – uz z (1.1)
где uz – передаточное отношение; h0 – начальное положение рейки обеспечивающее максимальную подачу топлива. Знак «─» свидетельствует о наличии отрицательной обратной связи.
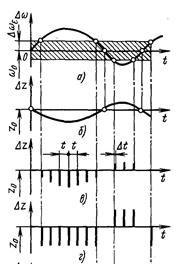 |
Рис. 1.3 Виды регулирующих воздействий: а) отклонение регулируемого параметра; б) непрерывное воздействие регулятора; в) прерывистое (импульсное) воздействие с амплитудой, пропорциональной отклонению регулируемого параметра; г) прерывистое (импульсное) с постоянной амплитудой.
Основным отличием системы управления от системы регулирования является отсутствие в простейшей САУ общей замкнутой цепи взаимодействия элементов (Рис. 1.1, d). В замкнутых системах воздействие регулятора на двигатель зависит от результата воздействия. В разомкнутых системах такой зависимости нет.
По характеру взаимодействия элементов САР и САУ подразделяются на системы непрерывного и прерывистого действия. При непрерывном регулировании отклонение, например, угловой скорости коленчатого вала двигателя на ∆ω от ее стационарного значения ωо (рис 1.3, а) вызывает непрерывное воздействие на объект через соответствующее отклонение ∆z выходной координаты регулятора (рис. 1.3, б) от ее стационарного значения zо.
При прерывистом регулировании (рис. 1.3, в) отклонение параметра измеряется непрерывно, а воздействие на объект осуществляется прерывисто (через некоторые интервалы времени t импульсами длительностью ∆ t). Причем амплитуда импульса может быть как пропорциональной отклонению регулируемого параметра (рис. 1.3, в), таки постоянной (см. рис. 1.3, г).

