 2015-04-01
2015-04-01 1023
1023В современных автомобилях широко используются двигатели как с наддувом, так и без наддува. В теории автоматического регулирования более просто описываются переходные процессы для двигателя без наддува. Поэтому ниже приведена детализация дифференциального уравнения (1.8) для такого двигателя.
Сначала представим текущие значения ω, М Мс через сумму значений: ωо, Мо Мсо (значения в выбранном равновесном режиме – постоянные величины)и отклонений: ∆ω, ∆M, ∆Мс (переменные величины):
ω = ωо + ∆ω, М = Мо + ∆M Мс = Мсо + ∆Мс (1.10)
. Подстановка текущих значений параметров в уравнение (1.8) с учетом уравнения (1.2) приводит его к виду
J d(Δω)/dt = ΔМ – ΔМс (1.11)
Так как цикловая подача топлива определяется положением h органа управления (рейки, дроссельной заслонки) и угловой скоростью ω коленчатого вала, то:
 (1.13)
(1.13)
Разложение данной функциональной зависимости в ряд Тейлора и последующая линеаризация позволяют получить зависимость
 (1.14)
(1.14)
Момент Мс потребителя (рис. 1.6)зависит от угловой скорости ω и настройки N потребителя (например, выбор угла атаки винта, передачи, угла наклона дороги и т. п.), т. е.
 (1.15)
(1.15)
Аналогичная линеаризация этой формулы приводит к зависимости:
 (1.16)
(1.16)
Подставив (1.14) и (1.16) в (1.11) получим:

 (1.17)
(1.17)
далее, учитывая (1.5) имеем:
 (1.18)
(1.18)
Разделим (1.18) на комплекс qh =  , называемый коэффициентом эффективности воздействия на двигатель. Тогда соотношение (1.18) можно записать в виде
, называемый коэффициентом эффективности воздействия на двигатель. Тогда соотношение (1.18) можно записать в виде
 (1.19)
(1.19)
С целью последующего упрощения уравнения произведем замены:


 , (1.20)
, (1.20)
где:
 - относительное изменение угловой скорости (зависимая величина, которую необходимо определить);
- относительное изменение угловой скорости (зависимая величина, которую необходимо определить);
κ - задаваемое относительное изменение положения рейки топливного насоса;
α∂ - задаваемое относительное изменение нагрузки потребителя,
а также введем следующие обозначения:
– время собственно двигателя (сек.)
 (1.21)
(1.21)
– безразмерный коэффициент самовыравнивания:
 (1..22).
(1..22).
безразмерный коэффициент усиления по настройке потребителя (по нагрузке)
 (1.23)
(1.23)
Тогда после всех подстановок перепишем (1.19) в виде:
 (1.24)
(1.24)
В теории автоматического регулирования широко используется операторная запись дифференциальных уравнений. В этом случае операция дифференцирования по времени d/dt обозначается символом (оператором) p, и уравнение (1.24) в операторной записи имеет вид
 (1.25)
(1.25)
где  - есть собственный оператор, который обозначается как:
- есть собственный оператор, который обозначается как:
 (1.26)
(1.26)
В результате уравнение (1.26) примет вид:
 (1.27)
(1.27)
Операторная запись дифференциального уравнения дает возможность получить передаточные функции некоторого элемента, характеризующие воздействие на него той или иной входной координаты. Для этого все члены уравнения следует поделить на собственный оператор  . В этом случае уравнение (1.27) запишется в виде
. В этом случае уравнение (1.27) запишется в виде
 (1.28)
(1.28)
где  - передаточная функция по ходу рейки, определяемая по выражению:
- передаточная функция по ходу рейки, определяемая по выражению:
 (1.29)
(1.29)
 - передаточная функция по нагрузке, определяемая по выражению:
- передаточная функция по нагрузке, определяемая по выражению:
 (1.30)
(1.30)
Таким образом, число передаточных функций элемента (двигателя) соответствует числу его входных координат  .
.
Запись дифференциального уравнения (1.25) через передаточные функции дает возможность построить структурную схему элемента, отражающую его динамические свойства. Каждая передаточная функция в структурной схеме изображается прямоугольником, а входные и выходные координаты - стрелками. В соответствии с уравнением (1.30) все выходные координаты суммируются, поэтому структурная схема собственно двигателя будет иметь вид, показанный на рис. 1.8.
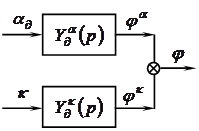 |
Рис. 1.8 Функциональная схема двигателя без наддува.








