 2015-04-30
2015-04-30 4449
4449Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения—вращения вала — в электрический сигнал — выходное напряжение.
Основное требование, предъявляемое к тахогенераторам,— линейность выходной характеристики, т. е. строгая пропорциональность между выходным напряжением Uтг и частотой вращения n:
 (1.39)
(1.39)
где k – постоянная величина;
α – угол поворота.
Тахогенераторы используются в технике для различных целей: измерения частоты вращения; осуществления обратных связей по скорости в системах автоматического регулирования; выполнения электрического дифференцирования и интегрирования в схемах счетно-решающих устройств.
Тахогенераторами могут быть машины как переменного (синхронные и асинхронные), так и постоянного тока.
Тахогенераторы постоянного тока — это небольшие генераторы постоянного тока с независимым возбуждением (рис. 1.14, а) или с возбуждением от постоянных магнитов.
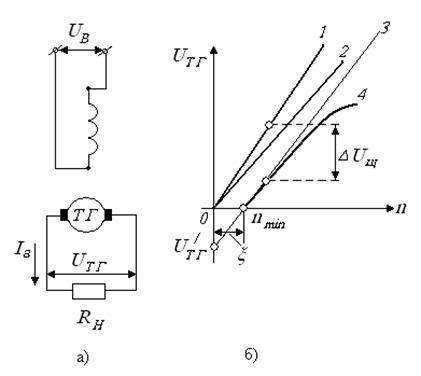
Рис. 1.14. Тахогенератор достоянного тока
Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Выходное напряжение тахогенератора Uтг может быть выражено через ЭДС якоря Еа, падение напряжения в обмотке якоря Iаrа и падение напряжения на щеточном контакте ΔUщ:
Uтг= Еа- Iаrа- ΔUщ. (1.40)
Выразим ЭДС якоря через магнитный поток возбуждения и частоту вращения n:
Еа=сеФп,
а ток якоря Ia через напряжение на выходе тахогенератора и сопротивление нагрузки Rн:

Подставив Еа и Ia в выражение (1.40), получим
 ,
,
откуда найдем окончательное выражение выходного напряжения
 (1.41)
(1.41)
Если пренебречь падением напряжения на щеточном контакте (принять ΔUщ. =0), то выражение выходного напряжения примет вид
 . (1.42)
. (1.42)
При постоянных Ф, rа и Rн выходное напряжение строго пропорционально частоте вращения:
 . (1.43)
. (1.43)
Зависимость напряжения на выходе тахогенератора Uтг от частоты вращения п называется выходной характеристикой (рис. 1.14, б).
Величина k, равная отношению выходного напряжения Uтг к частоте вращения п:
 (1.44)
(1.44)
называется крутизной выходной характеристики и является одной из основных величин, определяющих свойства тахогенераторов. У современных тахогенераторов крутизна составляет 3÷100  .
.
Чем больше се, Ф и Rн и меньше rа, тем больше крутизна выходной характеристики. Наибольшая крутизна имеет место при холостом ходе, когда Rн = ∞ (прямая 1 рис. 1.14, б):
kmax = сeФ. (1.45),
При этом
Uтгmax = Еа = сеФп. (1.46)
Чем меньше сопротивление нагрузки Rн, тем меньше крутизна характеристики (прямая 2, рис. 1.14, б).

 В реальном тахогенераторе ΔUщ ≠0, поэтому выходная характеристика Uтг = f(n) пересекает ось ординат (при п =0), как это следует из равенства (1.41), не в начале координат, а в точке
В реальном тахогенераторе ΔUщ ≠0, поэтому выходная характеристика Uтг = f(n) пересекает ось ординат (при п =0), как это следует из равенства (1.41), не в начале координат, а в точке
 (прямая 3, рис. 1.14, б).
(прямая 3, рис. 1.14, б).
За счет падения напряжения в щеточном контакте у тахогенератора появляется зона нечувствительности ε — зона частот вращения от п =0 до пmin, при которых выходное напряжение тахогенератора равно нулю. Границу зоны нечувствительности пmin можно найти из выражения (1.41), подставив в него Uтг =0:
 (1.47)
(1.47)
Если магнитная система тахогенератора насыщена и сопротивление нагрузки Rн невелико, то магнитный поток Ф тахогенератора при его работе не остается постоянным — он уменьшается на величину ΔФ с увеличением частоты вращения за счет размагничивающего действия реакции якоря. При этом крутизна кривой выходной характеристики также уменьшается:
и выходная характеристика тахогенератора Uтг = f(n) отклоняется от прямолинейной (кривая 4, рис. 1.14, б). У тахогенератора появляется погрешность, величина которой обычно составляет 0,5÷3%. Для устранения погрешности, вносимой реакцией якоря, тахогенераторы выполняют с ненасыщенной магнитной системой.
За счет электрических потерь, а также внешних воздействий температура обмоток тахогенератора не остается постоянной. Нагрев обмоток приводит к увеличению их сопротивления. Сопротивление обмотки якоря тахогенератора rа обычно невелико, и его изменение мало влияет на выходную характеристику. Изменение сопротивления обмотки возбуждения rв приводит к изменению тока возбуждения Iв, а следовательно, и магнитного потока Ф. Последнее ведет к изменению крутизны выходной характеристики и появлению температурной погрешности тахогенератора.
Чтобы устранить температурную погрешность, необходимо поддерживать постоянным либо ток возбуждения, либо магнитный поток. Первое может быть достигнуто включением в. цепь обмотки возбуждения специального, независящего от температуры добавочного сопротивления rдоб»rв. В этом случае величина тока возбуждения практически определяется сопротивлением rдоб, которое стабильно и почти не зависит от температуры:
 .
.
Стабильность магнитного потока возбуждения при возможных колебаниях тока возбуждения достигается сильным насыщением магнитной системы тахогенератора. В этом случае даже значительное изменение тока возбуждения  мало влияет на величину магнитного потока (
мало влияет на величину магнитного потока ( ) (рис. 1.15).
) (рис. 1.15).
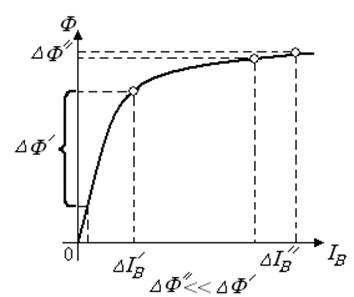
Рис.1.15 Влияние степени магнитного насыщения на температурную погрешность тахогенератора
Однако насыщение тахогенератора увеличивает размагничивающее действие реакции якоря, поэтому оно недопустимо при сравнительно больших токах якоря.
Тахогенераторы, возбуждаемые постоянными магнитами, не имеют обмотки возбуждения, поэтому их температурная погрешность, возникающая только за счет изменения сопротивления обмотки якоря, очень незначительна.
Наличие в выходной цепи тахогенераторов постоянного тока щеточных контактов обусловливает появление целого ряда недостатков:
— нестабильности выходной характеристики вследствие изменения переходного сопротивления скользящих контактов;
— зоны нечувствительности при малых частотах вращения;
— несимметрии выходной характеристики — неравенства напряжения при вращении якоря в различных направлениях;
— пульсации выходного напряжения; излучения радиопомех; снижения надежности и пр.
Несимметрия выходного напряжения возникает за счет неточной установки щеток на геометрической нейтрали или смещения их в процессе эксплуатации. Ошибка асимметрии обычно выражается в процентах:
где Uпр и Uлев — напряжения соответственно при правом и левом вращении якоря с одной и той же частотой.
В современных тахогенераторах ошибка несимметрии составляет 1÷3%.
Чтобы устранить недостатки, вносимые щеточными контактами, их переходное сопротивление стараются свести к минимуму. Для этого применяют медно-графитные и серебряно-графитные щетки, а для прецизионных тахогнераторов счетно-решающих устройств даже щетки с серебряными и золотыми напайками.
Для снижения радиопомех тахогенераторы снабжают либо специальными экранами, либо электрическими фильтрами.
Серьезный недостаток тахогенераторов постоянного тока — наличие пульсаций выходного напряжения. Причины возникновения пульсаций весьма разнообразны, однако их можно разделить на три группы: якорные, зубцовые и коллекторные.
Якорные пульсации возникают из-за пульсации магнитного потока вследствие неравномерности воздушного зазора и неравенства магнитной проводимости якоря в различных радиальных направлениях. Чтобы устранить их, увеличивают воздушный зазор; обрабатывают по высокому классу точности цилиндрические поверхности якоря, вала, подшипниковых щитов; применяют веерную сборку пакета якоря — каждый последующий лист стали смещают на одно зубцовое деление по отношению к предыдущему, выравнивая таким образом магнитную проводимость якоря в различных радиальных направлениях.
Зубцовые пульсации возникают вследствие пульсаций магнитной проводимости воздушного зазора из-за зубчатого строения якоря. Для их устранения пазы якоря скашивают на одна зубцовое деление; правильно выбирают ширину полюсных наконечников, число пазов якоря; применяют магнитные клинья и т. п.
Коллекторные пульсации возникают из-за вибрации щеток; вследствие неровностей коллектора, его эллиптичности; периодического изменения числа секций обмотки якоря в параллельных ветвях; добавочных коммутационных токов, нагружающих контакт, и т. п. Чтобы устранить эти недостатки, тщательно подбирают число коллекторных пластин, повышают качество щеток и щеткодержателей, улучшают качество обработки коллектора и т.п.
Однако несмотря на все перечисленные меры, пульсации выходного напряжения в тахогенераторах постоянного тока обычной конструкции полностью устранить не удается. Желание свести их до минимума привело к созданию тахогенераторов постоянного тока с полым якорем, выполненных аналогично малоинерционным исполнительным двигателям постоянного тока. У этих тахогенераторов совершенно отсутствуют якорные и зубцовые пульсации, так как якорь не имеет зубцов; реакция якоря незначительна, а коммутация очень хорошая.








