 2015-04-30
2015-04-30 2944
2944В отличие от двигателей с якорным управлением у исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (см. рис. 1.2, б).
Якорь двигателя постоянно подключен к сети с напряжением UB = const. Для ограничения тока иногда последовательно с якорем включают балластное сопротивление Rдоб. На обмотку полюсов напряжение управления Uy (сигнал) подается лишь тогда, когда необходимо вращение якоря.


 Из-за отсутствия насыщения основной магнитный поток Фу пропорционален току Iу и напряжению Uy управления:
Из-за отсутствия насыщения основной магнитный поток Фу пропорционален току Iу и напряжению Uy управления:
Фу=СфUу=сфαUв. (1.17)
Здесь  — коэффициент сигнала.
— коэффициент сигнала.
При вращении якоря в его обмотке, называемой в данном двигателе обмоткой возбуждения, наводится ЭДС
Ев=сеФуп=сесфаUвп. (1.18)
Как и в любом двигателе постоянного тока, ток возбуждения (якоря)
 , (1.19)|
, (1.19)|
где rв — сопротивление обмотки якоря.
Вращающий момент двигателя создается за счет взаимодействия тока якоря Iв с магнитным потоком полюсов Фу:
М=ст1вФу. (1.20)
Подставив в равенство (1.20) выражения потока из (1.17) и тока из (1.19), а затем заменив в полученном уравнении ЭДС Ев согласно (1.18), получим уравнение момента
 . (1.21)
. (1.21)
За единицу момента в системе относительных единиц примем как и у двигателя с якорным управлением, пусковой момент Мпуск1 при неподвижном якоре n =0 в случае равенства напряжений управления и возбуждения (α =1):
Поделив действительный момент М на единичный Мпуск1, найдем выражение момента в относительных единицах:
 . (1.22)
. (1.22)
Примем за единичную частоту вращения n01 ту же частоту, что и при якорном управлении (1.9), т. е. частоту вращения при идеальном холостом ходе (при n =0) при условии равенства напряжений управления и возбуждения (Uy=Uв; α =l). Тогда, заменив в выражении (1.22) сесф на  и
и  на ν (относительная частота), получим уравнение механической характеристики двигателя с полюсным управлением m=f(v) при α = const:
на ν (относительная частота), получим уравнение механической характеристики двигателя с полюсным управлением m=f(v) при α = const:
m = α — α2v. (1.23)
Из этого уравнения следует, что механические характеристики двигателя с полюсным управлением являются прямыми линиям (рис.1.6).
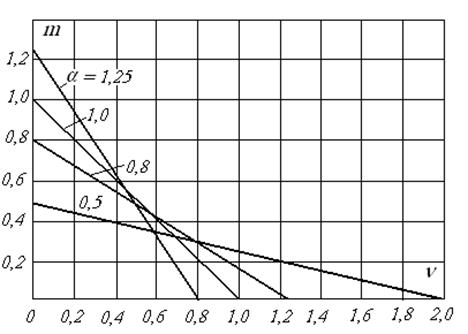
Рис. 1.6 Механические характеристики при полюсном управлении
В отличие от двигателя с якорным управлением жесткость механических характеристик при изменении коэффициента сигнала α (напряжения управления Uy) не остается постоянной. Чем меньше α, тем меньше жесткость характеристик, т. е. больше изменение частоты при меньших изменениях момента.
Начальный пусковой момент двигателя (при ν =0) здесь так же, как и у двигателей с якорным управлением, прямо пропорционален напряжению управления (коэффициенту сигнала α). В относительных единицах mnycк = α.
Частота вращения при идеальном холостом ходе (ν0 при m =0) в отличие от ранее рассмотренных исполнительных двигателей не прямо, а обратно пропорциональна напряжению управления Uy или коэффициенту сигнала α:
 . (1.24)
. (1.24)
Теоретически при Uу =0 (α =0) частота вращения ν0 возрастет до бесконечности (двигатель пойдет «в разнос»). Но в реальных двигателях этого не наблюдается, так как даже при холостом ходе якорь двигателя испытывает некоторый момент сопротивления, обусловленный трением в подшипниках, щеточном контакте и трением вращающихся частей о воздух, т. е. момент сопротивления двигателя практически никогда не равен нулю.
Однако при Uу =0 (при отсутствии нагрузки на валу) частота вращения якоря может в несколько раз превосходить его номинальную частоту вращения, что весьма опасно, ибо может привести к разрушению двигателя — «разносу». Опасность разноса особенно велика у двигателей сравнительно большой мощности, где момент трения во много десятков раз меньше номинального момента.
Наилучшей гарантией от «разноса» двигателя является наличие на его валу постоянного момента сопротивления, исключающего возможность работы двигателя вхолостую.
Уравнение регулировочной характеристики двигателя с полюсным управлением v=f(a) при m =const может быть получено путем преобразования уравнения механической характеристики (1.23):
 (1.25)
(1.25)
Из уравнения (1.25) и рис. 1.2 видно, что в отличие от двигателя с якорным управлением регулировочные характеристики дви 

 гателя с полюсным управлением нелинейны —частота вращения ν не изменяется прямо пропорционально напряжению управления Uу (коэффициенту сигнала α).
гателя с полюсным управлением нелинейны —частота вращения ν не изменяется прямо пропорционально напряжению управления Uу (коэффициенту сигнала α).
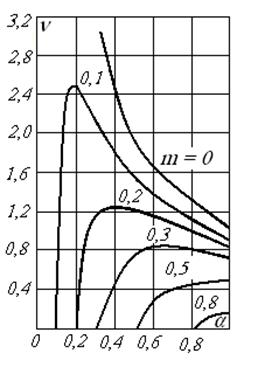
Рис. 1.7 Регулировочные характеристики при полюсном управлении
Нелинейность регулировочных характеристик является большим недостатком двигателей с полюсным управлением. Однако еще большим недостатком этих двигателей является неоднозначность регулировочных характеристик при малых моментах сопротивления (от 0 до 0,5 Мпуск)—одна и та же частота вращения может быть получена при двух различных по величине напряжениях управления (коэффициентах сигнала α).
Исполнительные двигатели с полюсным управлением обычно применяются в схемах автоматики, где момент сопротивления на валу двигателя не опускается ниже 0,5 Мпуск1. Это исключает неоднозначность регулировочных характеристик и возможность разноса двигателя при отсутствии напряжения управления.
Напряжение трогания у двигателя с полюсным управлением так же, как и у двигателя с якорным управлением, пропорционально моменту сопротивления на валу (при ν =0; αтр=m)
Мощность возбуждения двигателя с полюсным управлением является мощностью в цепи якоря:
Pв=UвIв (1.26)
Эта мощность составляет основную часть потребляемой двигателем мощности (95% у двигателей с номинальной мощностью 200 ÷ 250 Вт и 70% у двигателей с мощностью 5 ÷7 Вт). Она равна сумме полной механической мощности на валу двигателя и потерь в якоре.
Обычно обмотка возбуждения питается от сети, мощность которой почти не лимитируется в отличие от мощности усилителей, питающих обмотку управления. Поэтому большое в процентном отношении значение мощности возбуждения (в цепи якоря) является ценным качеством двигателя с полюсным управлением, выгодно отличающим его от двигателя с якорным управлением, где большая часть потребляемой мощности поступает от усилителя.
Мощность управления двигателя постоянного тока с полюсным управлением идет лишь на покрытие электрических потерь в обмотках полюсов:
 .
.
Ее величина по сравнению со всей мощностью, потребляемой двигателем, а также по сравнению с мощностью возбуждения весьма незначительна, особенно при малых напряжениях управления (коэффициентах сигнала α). Даже при номинальных напряжениях управления (α =1) она составляет не более 30% от всей мощности, потребляемой двигателями мощностью 5÷7 Вт и не более 5% —двигателями мощностью 200÷250 Вт.
Малая мощность управления — положительное качество двигателей с полюсным управлением и большое их преимущество перед двигателями с якорным управлением.
Полная механическая мощность на валу двигателя может быть выражена как произведение момента на частоту вращения. Если момент выразить из равенства (1.23), то
p2=mν=(α—α2ν)ν=αν—α2ν2. (1.27)
Продифференцировав р2 по ν и приравняв производную нулю, можно найти частоту вращения νp2max, при которой механическая мощность максимальна:
 (1.28)
(1.28)
Так как согласно (1.24) частота вращения при холостом ходе двигателя в относительных единицах , то, очевидно, максимум механической мощности имеет место при частоте вращения, равной половине частоты вращения при холостом ходе.
Подставив νp2max в выражение (1.27), найдем максимальную механическую мощность в относительных единицах:

Из полученного выражения следует, что величина максимальной механической мощности не зависит от коэффициента сигнала α (напряжения управления Uy). Согласно уравнению (1.28) от него зависит частота вращения, при которой имеет место максимум мощности
Независимость максимума механической мощности от напряжения управления (коэффициента сигнала α) — ценное качество двигателей постоянного тока с полюсным управлением, позволяющее даже при незначительных напряжениях управления получать значительные механические мощности на валу двигателя.
На рис. 1.8 представлено семейство кривых p2 = f(ν) при α =const (где α =0,25; 0,50; 0,75; 1,0), наглядно иллюстрирующее вышесказанное.
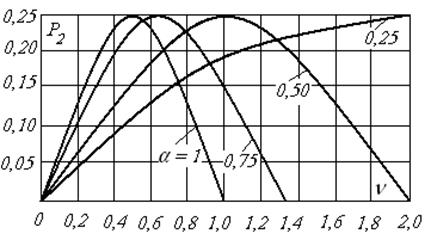
Рис. 1.8 Зависимости механической мощности от частоты вращения при полюсном управлении








