 2015-05-05
2015-05-05 2858
2858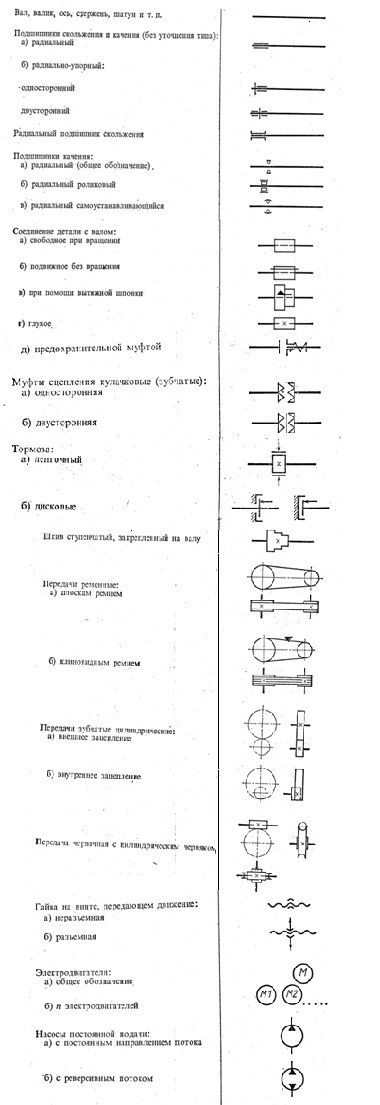
Зубчатая передача
ί зуб. пер.= 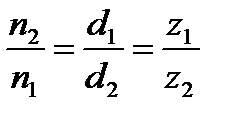
d1=m*z1
d2=m*z2
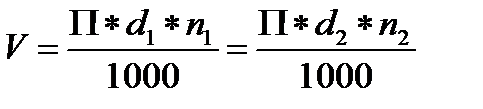
Ременная передача
| d1 |
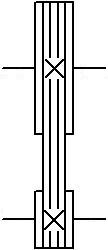
ίрем. п.=  ,
,  0,985 – коэфф. проскальзывания Р.П.
0,985 – коэфф. проскальзывания Р.П.
Червячная передача
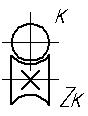 ίчер.п.=
ίчер.п.=  , К – число заходов червяка, Zk – число зубьев червячного колеса
, К – число заходов червяка, Zk – число зубьев червячного колеса
Передача необратимая, т.е. движение передается только от червяка к червячному колесу.
Для преобразования вращательного движения в поступательное наиболее часто применяют реечные и винтовые передачи.
Реечная передача
Передача обратимая, чаще вращается реечная шестерня, перемещается рейка, но бывает наоборот.
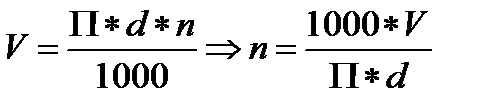
n – число оборотов реечной шестерни
П. – постоянная 3.14
m – модуль реечного зацепления
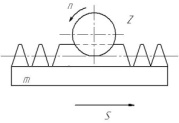 Z – число зубьев реечного колеса
Z – число зубьев реечного колеса
Lмм – перемещение рейки за один оборот реечной шестерни: L=1*П*m*Z
Lмм = n∙П∙m∙Z – перемещение рейки за n оборотов реечной шестерни.
 Винтовая передача
Винтовая передача
k – число заходов ходового винта, t – шаг ходового винта в мм
Виды:
1) Неразъемная гайка
2) Разъемная гайка
3) Винтовая пара качения (гайка сопрягается с винтом через шарики)
Lмм=1∙k∙t, перемещение гайки за 1 оборот ходового винта
Lмм=n∙k∙t – перемещение гайки за n оборотов ходового винта.
Изображение кинематических пар, соединённых в определённой последовательности в
кинематические цепи в одной плоскости, называется кинематической схемой.








