 2015-05-05
2015-05-05 3575
3575Электромеханические свойства трехфазных асинхронных двигателей
Физический принцип работы и схемы замещения
Трехфазный асинхронный двигатель является основным типом асинхронных машин. Статор двигателя служит для создания основного магнитного потока. В пазы статора укладывают три фазных обмотки, смещенные в пространстве на 120 °. Обмотки соединяются в звезду или треугольник и подключаются к трехфазной системе переменного синусоидального тока.
Ротор обычно выполняется как короткозамкнутый; в его пазах размещаются стержни обмотки, которые замыкаются кольцами на его торцах.
В двигателях нормального исполнения обмотка ротора обычно выполняется заливкой пазов расплавленным алюминием. Одновременно отливаются кольца, замыкающие стержни. Форма паза ротора влияет на вид механической характеристики.
Кроме двигателей с короткозамкнутым ротором имеются двигатели с фазным ротором, в которых обмотка ротора выполняется аналогично обмотке статора. Обмотка такого ротора обычно соединяется в звезду, и три ее свободных конца присоединяют к трем медным кольцам, расположенным на валу ротора и изолированным от него и друг от друга. К кольцам через неподвижные щетки подключают внешние устройства для получения искусственных механических характеристик. Магнитопроводы статора и ротора выполняются шихтованными из электротехнической стали. Для снижения намагничивающего тока воздушный зазор между статором и ротором должен быть как можно меньше.
Три фазных обмотки статора, по которым протекает трехфазный переменный ток, создают вращающееся магнитное поле. Это поле взаимодействует с токами, индуцированными в проводниках обмотки ротора.
При вращении магнитного поля в направлении, указанном стрелкой (рис. 3.14), направление эдс в проводнике ротора будет соответствовать указанному точкой. Такое же направление будет иметь и активная составляющая тока ротора I2а.
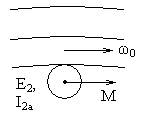
Рис. 3.14. К определению направления электромагнитного момента
Электромагнитный момент стремится повернуть ротор в направлении вращения магнитного поля, т.е. асинхронная машина работает двигателем.
Величина электромагнитного момента определяется магнитным потоком и активной составляющей тока ротора:
 , (3.25)
, (3.25)
где сМ – постоянная двигателя.
Скорость вращения магнитного поля в воздушном зазоре
 ,
,
где f1 – частота переменного тока;
р – число пар полюсов.
Принципиально важно, что в асинхронном двигателе скорость вращения ротора ω не может быть равна скорости вращения магнитного
поля ω0.
Разность скоростей ω0 – ω называется абсолютным скольжением асинхронного двигателя. Отношение абсолютного скольжения к скорости магнитного поля называется скольжением:
 .
.
При неподвижном роторе асинхронный двигатель представляет собой трансформатор и отличается от обычного трансформатора только воздушным зазором, наличие которого в магнитной системе ведет к увеличению тока холостого хода (тока намагничивания).
Если пренебречь падением напряжения в обмотке статора от тока холостого хода, то эдс обмотки приблизительно уравновешивает
приложенное к ней напряжение:  , где E1 и U1 соответственно фазные эдс и напряжение.
, где E1 и U1 соответственно фазные эдс и напряжение.
Эдс обмотки статора
 ,
,
где w 1 – число витков обмотки статора;
 – обмоточный коэффициент; его величина Kw < 1; введением этого коэффициента учитывают уменьшение результирующей эдс при геометрическом сложении эдс отдельных витков обмотки, распределенных по пазам статора.
– обмоточный коэффициент; его величина Kw < 1; введением этого коэффициента учитывают уменьшение результирующей эдс при геометрическом сложении эдс отдельных витков обмотки, распределенных по пазам статора.
Эдс ротора (при неподвижном роторе)
 .
.
Отношение  называется коэффициентом трансформации.
называется коэффициентом трансформации.
Если считать, что  , что реально имеет место в двигателе с фазным ротором, коэффициент трансформатора
, что реально имеет место в двигателе с фазным ротором, коэффициент трансформатора
 . (3.26)
. (3.26)
Режим работы с заторможенным ротором соответствует режиму короткого замыкания, который аналогичен режиму короткого замыкания трансформатора. Для асинхронного двигателя режим короткого замыкания при номинальном напряжении сети U 1 ном соответствует режиму пуска при прямом включении в сеть. Длительно находиться в таком режиме двигатель не может, так как токи в фазных обмотках статора превышают номинальные (при вращающемся роторе) в 5-7 раз.
Основной магнитный поток в режиме короткого замыкания невелик, поэтому можно считать, что мдс обмоток статора и ротора равны:
 .
.
Коэффициент трансформации по току
 . (3.27)
. (3.27)
Ток  называется приведенным током ротора.
называется приведенным током ротора.
В схемах замещения асинхронных двигателей используют приведенные активные и реактивные сопротивления ротора. Приведение выполняют на основе равенства электрических потерь (потерь в меди) в реальном и приведенном роторе:
 , (3.28)
, (3.28)
где  – суммарное сопротивление фазы ротора с учетом добавочного сопротивления;
– суммарное сопротивление фазы ротора с учетом добавочного сопротивления;
 – суммарное приведенное сопротивление фазы ротора с учетом добавочного сопротивления.
– суммарное приведенное сопротивление фазы ротора с учетом добавочного сопротивления.
Схема включения асинхронного двигателя с фазным ротором приведена на рис. 3.15.
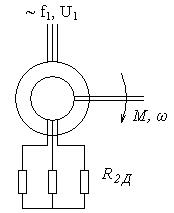
Рис. 3.15. Схема включения трехфазного асинхронного двигателя
с фазным ротором
Приведенное сопротивление ротора, найденное из (3.28):
 .
.
С учетом (3.26) и (3.27)
 ;
;
 ,
,
где  .
.
Частота тока в обмотке ротора:
 . (3.29)
. (3.29)
Параметры асинхронной машины не являются строго постоянными и в некоторых типах двигателей со специальной формой паза ротора (например, глубокий паз, двойная беличья клетка) зависят от частоты тока ротора.
В режиме короткого замыкания (S = 1, f 2 = f 1) реактивное сопротивление ротора имеет наибольшее значение, равное
 , (3.30)
, (3.30)
где L 2 – индуктивность рассеяния обмотки ротора.
При вращающемся роторе (f 2 = f 1ּ S):
 , (3.31)
, (3.31)
т.е. индуктивное сопротивление обмотки ротора зависит от скольжения.
Исследование асинхронного двигателя удобно выполнять на основе схем замещения.
При неподвижном приведенном роторе двигатель представляет собой трансформатор, схема замещения которого приведена на рис. 3.16.
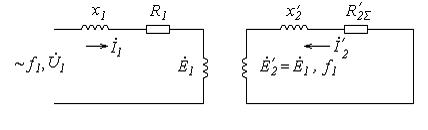
Рис. 3.16. Схема замещения приведенного асинхронного двигателя при неподвижном роторе
При вращающемся роторе эдс и ток ротора имеют частоту скольжения f 2 = f 1ּ S, при которой  и
и  . Схема замещения приведена на рис. 3.17.
. Схема замещения приведена на рис. 3.17.
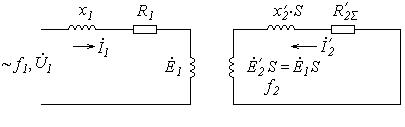
Рис. 3.17. Схема замещения приведенного асинхронного двигателя при вращающемся роторе
Из схемы замещения (рис. 3.17) приведенный ток ротора:
или
 . (3.32)
. (3.32)
Выражение для тока (3.32) придает новый физический смысл параметрам схемы замещения. При вращающемся роторе во вторичной цепи действует такая же эдс, как и при неподвижном роторе, но при этом изменяются параметры вторичной цепи, в частности, вместо сопротивления  вводится сопротивление
вводится сопротивление  , взамен
, взамен  вводится сопротивление
вводится сопротивление  . Формально это означает, что в цепь ротора вводится дополнительное сопротивление
. Формально это означает, что в цепь ротора вводится дополнительное сопротивление  , зависящее от скольжения; величина этого сопротивления определяется из равенства
, зависящее от скольжения; величина этого сопротивления определяется из равенства
 . (3.33)
. (3.33)
Кроме того, во вторичной цепи индуктивное сопротивление рассеяния в этом случае не зависит от скольжения.
Такая, по сути, формальная процедура позволяет исследовать работающий асинхронный двигатель как бы при неподвижном роторе, но с дополнительным сопротивлением во вторичной цепи.
В сопротивлении рассеивается электромагнитная мощность, которая нормально передается через воздушный зазор ротору (рис. 3.18).
В (3.33) первое слагаемое соответствует потерям собственно в обмотке ротора, второе эквивалентно активной нагрузке и соответствует той части передаваемой на ротор мощности, которая преобразуется в механическую:
 .
.
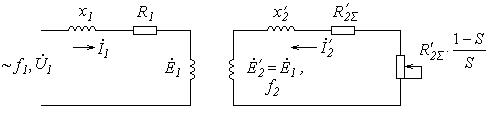
Рис. 3.18. Схема замещения приведенного асинхронного двигателя, соответствующая (3.33)
Так как в схемах замещения 3.16 – 3.18  и f 1 = f 2, асинхронный двигатель можно представить Т-образной схемой замещения, в которой магнитная связь между обмотками статора и ротора заменена электрической, представленной ветвью с сопротивлениями xμ и Rμ (рис. 3.19).
и f 1 = f 2, асинхронный двигатель можно представить Т-образной схемой замещения, в которой магнитная связь между обмотками статора и ротора заменена электрической, представленной ветвью с сопротивлениями xμ и Rμ (рис. 3.19).
Без большой погрешности намагничивающую ветвь можно перенести на выводы напряжения сети U 1 и получить Г-образную схему замещения, в которой не учитывается падение напряжения на сопротивлениях обмотки статора R 1 и x 1 от намагничивающего тока  при определении из схемы замещения тока ротора (рис. 3.20).
при определении из схемы замещения тока ротора (рис. 3.20).
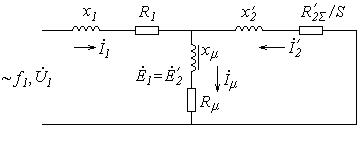
Рис. 3.19. Т-образная схема замещения приведенного асинхронного двигателя
В схеме на рис. 3.20 индуктивное сопротивление короткого замыкания
 .
.
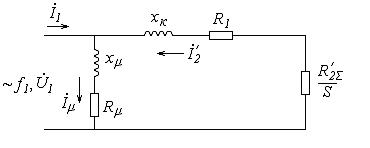
Рис. 3.20 Г-образная схема замещения приведенного асинхронного двигателя

